この記事では、ドローン国家資格<学科試験>の公式テキストである
無人航空機の特徴、飛行原理、飛行性能(教則P29~P35)について解説します
<誰に対して提供するか)>ドローンの国家資格(無人航空機操縦者技能証明)の学科試験を 高額なスクールや教材を使わずに、無料で独学で勉強しようとしている方へ
<この記事でわかること・解決する問題>
学科試験(無人航空機の飛行の安全に関する教則<国交省公式>)内容のわかりにくい所を、図や実例を用いて分かり易く解説し、「なぜこのような制度なのか?」という理由を掘り下げて解説することを目指す
〇 前回の記事「法規制~その3 その他の法令、政令等」はこちら
◉ 「無人航空機の飛行の安全に関する教則」解説トップページはこちらから
コスパ最強!入門機からプロの空撮まで使われている「DJI mini2」をリーズナブルな価格で!

4. 無人航空機のシステム その1
4.1 無人航空機の種類と特徴
4.1.1 無人航空機の種類
無人航空機には、主に
回転翼航空機(マルチローター)
回転翼航空機(ヘリコプター)
飛行機などが該当する。
「回転翼航空機(マルチローター)」及び「回転翼航空機(ヘリコプター)」は、垂直離着陸や空中でのホバリングが可能という特徴がある。
>ホバリングとは、空中で止まったまま動かない状態のこと
「飛行機」は、垂直離着陸やホバリングはできないが、回転翼航空機に比べ、飛行速度が速く、エネルギー効率が高いため、長距離・長時間の飛行が可能という特徴がある。
さらに、回転翼航空機のように垂直離着陸が可能で、巡行中は飛行機のように前進飛行が可能となる、両方の特徴を組み合わせた「パワードリフト機(Powered-lift)」もある。

4.1.2 「飛行機」の特徴
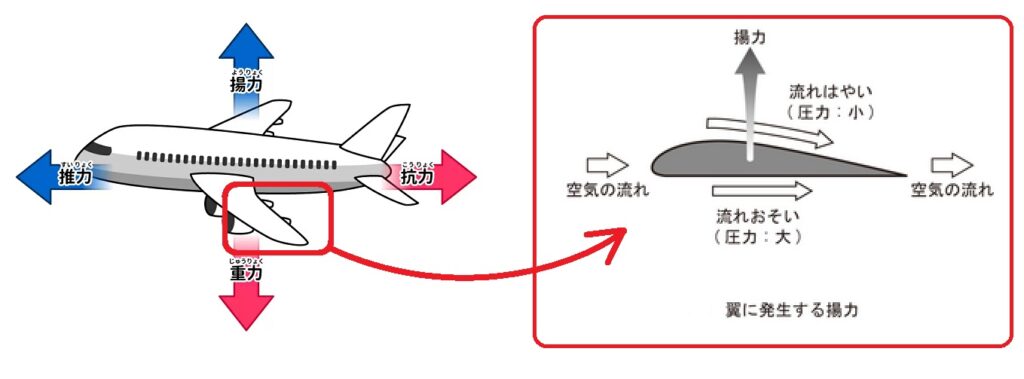
「飛行機」は、翼に揚力を発生させて自重を支えることができるのが特徴である。このため比較的少ないエネルギーで飛行し、長距離飛行が可能になる。
「揚力」について説明する
流れる空気の中に翼のような流線形をした物体が置かれると、流れと垂直方向に作用する力=揚力、流れの方向に働く力=抗力、が働く
プロペラは、2枚以上のブレードとよばれる翼が回転して揚力を発生する。
飛行機は回転翼航空機と比べると、
〇高速飛行、長時間飛行、長距離飛行が可能
であるが
△安全に飛行できる最低速度が決められておりそれ未満での低速飛行ができない
△水平離着陸には広いエリアが必要
…離着陸には機体のサイズに合わせた滑走路が必要となる。
△高度な操縦技能と飛行制御技術が必要
…加速・減速はピッチ、旋回(バンクターン)はロール、方向転換はヨー、上昇(スロットル)は備えられている推進パワー、これらの複合的な操縦で飛行する必要がある。推力により前進し空気を掴み揚力が生まれるので、回転翼航空機とは違いホバリングや後退、横移動はできない。姿勢安定装置を使用しない場合はバンクターンの操作はピッチ操作とロール操作の複合である。
過度の低速飛行や過度の上昇角度、過度の旋回半径小により翼面から空気が剥離する<失速>という状態に陥ることがある。失速時は舵の操作が効かなくなり極めて危険な状態である。失速を回避するためにも操縦には高い技能が求められ、特に手動操縦における離着陸は高度な技術を要する。

また、適切な機体設計によって無操縦・無制御でも飛行の安定が達成できる。仮に故障などによって飛行中に推力を失っても滑空飛行状態になればすぐには墜落しない。離着陸含めて自動飛行を行う場合は、発射装置や回収装置などの地上設備が必要となる場合がある。
(2) 大型機(最大離陸重量 25kg 以上)の特徴
〇大型機(最大離陸重量 25kg 以上)は主翼面積が大きくなるため、よりペイロード(積載可能重量)を大きくすることができる。
〇ガソリンエンジンなど推進動力の選択肢も広がるのでより長距離・長時間飛行も可能になる。
〇重量がある分、風の影響も受けにくくなる。
△事故発生時の影響が大きいことから、操縦者の運航への習熟度及び安全運航意識が十分に高いことが要求される。
△機体の慣性力が大きいことから、増速・減速・上昇・降下などに要する時間と距離が長くなるため、 障害物回避には特に注意が必要である。
△緊急着陸地点の選定も小型機より広い範囲が必要となる。
△一般に小型の機体よりも騒音が大きくなるため、飛行ルート周囲への配慮が必要である。
4.1.3 「回転翼航空機(ヘリコプター)」の特徴
「回転翼航空機(ヘリコプター)」は、
〇垂直離着陸、ホバリング、低速飛行が可能であるが、風の影響を受けやすい。
〇マルチローター型と比べると、ヘリコプター型は1組のローター(プロペラ)で揚力を発生させるため、マルチローター型に比べローターの直径が大きく、効率良く揚力を得る事が出来る。
△以下に示すような機構が必要であり、構造的に複雑となっている。
① ローターの回転面を傾けたり(機体を前後左右に運動させる場合)、ローターピッチ角を変えたり (上昇・降下させる場合)するために必要な機構 = スワッシュプレート等
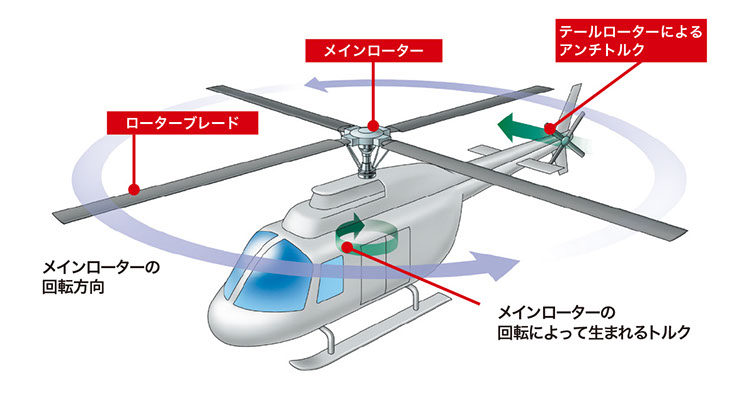
② ローターの反トルクを打ち消したり、向き(ヨー方向)を変える操縦に用いたりするテールローター
回転翼航空機(ヘリコプター)はメインローターの反トルクをテールローターで相殺する。メインローターは 1回転する間にブレードのピッチ角を周 期的に変化させる可変ピッチ機構を持ち、これによって機体のピッチ、ロールの姿勢制御を行い、テール ローターの推力を変化させてヨーの姿勢制御を行う。
(2) 大型機(最大離陸重量 25kg 以上)の特徴
回転翼航空機(ヘリコプター)において最大離陸重量 25kg 以上の大型機では、慣性力が大きく操舵時の機体挙動が遅れ気味になるため、特に定点で位置を維持するホバリングでは早めに操舵することが必要となる。
4.1.4 「回転翼航空機(マルチローター) 」の特徴
「回転翼航空機(マルチローター)」は
〇機体外周に配置された複数のローターを高速回転させる事で、上昇・降下、前後左右移動、空中静止(ホバリング)、機体の水平回転(ラダー)が可能。
〇大きなエネルギー消費により、複数のローターを高速回転させ揚力を得て飛行するが、風の影響を受けやすい飛行の安定性を高めるため、フライトコントロールシステムを用いローターの回転数を制御し、機体の姿勢や位置を安定させている。
〇操縦は送信機に備わるコントロールスティック等を操作して行う。
〇ローターの数によってそれぞれ呼称が異なる(ローターの数 4:クワッドコプター、6:ヘキサコプター 8:オクトコプター)。
△モーター性能を同一とした場合、ローターの数が多いほど故障に対する耐性が向上し、ペイロード(積載可能重量)が増える。
プロペラの回転にはトルクが必要であり、プロペラを回転させる原動機には反トルクが作用する。
回転翼航空機(マルチローター)はプロペラからの反トルクを相殺するために、偶数個のプロペラを半数ずつ異なる向きに回転させるのが一般である。
各プロペラの回転数を変化させ、推力とトルクを変化させてピッチ、ロール、ヨーの運動を行う。
●ローターの回転方向は、時計回転(CW:クロックワイズ)と反時計回転(CCW:カウンタークロックワイ ズ)の方向で構成され、反トルクによりの機体の回転バランスを保っている。
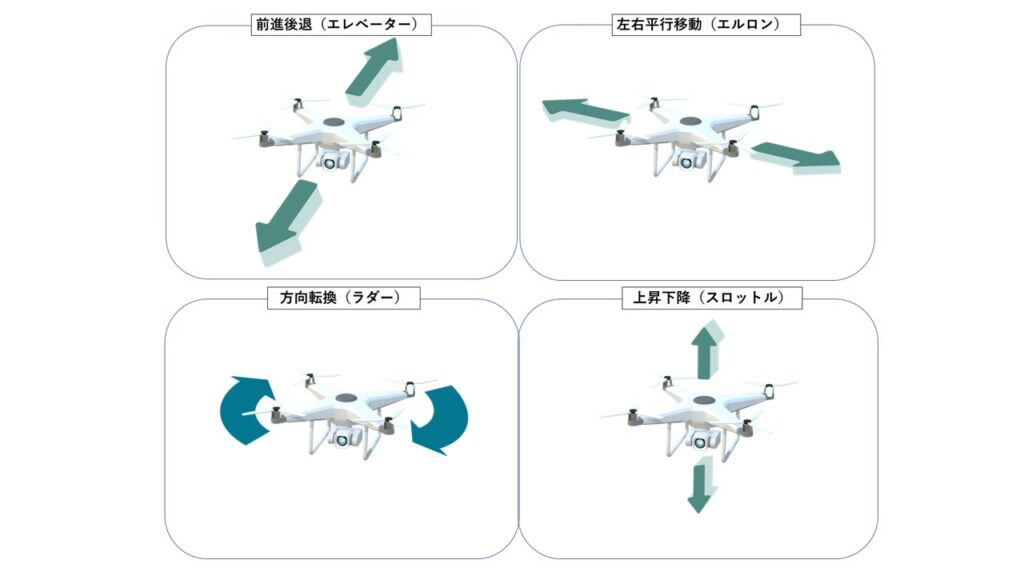
1) 上昇、ホバリング、降下(スロットル)
機体に備わる全てのローターを回転させ回転数を増加させていくと、揚力が機体重量を上回り、上昇し始める。機体重量と揚力が釣り合うとホバリングとなる。
ホバリング状態からローター回転数を下げると降下する。
2) 前後、左右移動(エレベーター・エルロン)
機体の前後左右移動は、その指示した側のローターの回転数を下げ、反対側のローター回転数を上げることで機体が傾き、ローター推力の合力が、指示した方向に傾くので、傾いた方向に機体が移動する。
3) 水平回転(ラダー)
ローターの反トルクバランスを崩すと機体の水平回転が始まる。
揚力を得ている状態で、右もしくは左回転を指示すると、指示した回転方向のローターの回転数が下がりトルクバランスが崩れ回転が始まる。
4) 大型機(最大離陸重量 25kg 以上)の特徴
回転翼航空機(マルチローター)の最大離陸重量 25kg 以上の大型機の特徴としては、
○ 機体寸法やローターのサイズ・モーターパワーも大きくなり、飛行時の慣性力も増加し、上昇・降下や加減速などに要する時間と距離が長くなる。
○ 離着陸やホバリング時の地面効果(ローター回転によって機体下方に風圧が発生し小石などを撒き散らす事)等の範囲が広がるため、操作制御が難しい。
○ 飛行時機体から発せられる騒音も大きくなり周囲への影響範囲も広がる。
4.2 無人航空機の機体の特徴(飛行の方法)
4.2.1 夜間飛行
(1) 夜間飛行と日中飛行の違い
航空法では原則として無人航空機は日出から日没までの間において飛行させることになっている。
これ以外の時間は、夜間飛行(日没から日出までの間)となり、承認が必要である(日没及び日出時刻は地域により異なるため要確認)
(2) 夜間飛行のために必要な装備
夜間飛行のための必須装備として、
◎夜間飛行では機体の姿勢や進行方向が視認できないため、灯火を搭載した機体が必要
※ただし、無人航空機周辺が十分に照らされている場合はこの限りではない
〇地形や人工物等の障害物も視認できないため、離着陸地点や計画的に用意する緊急着陸地点、飛行経路中の回避すべき障害物も視認できるように地上照明を当てる事が望ましい。
〇操縦者の手元で位置、高度、速度等の情報が把握できる送信機を使用することが望ましい。
〇夜間対応のビジョンセンサーが機体に搭載されていることが望ましい。
4.2.2 目視外飛行
(1) 目視外飛行と目視内飛行の違い
無人航空機は原則として、肉眼で機体を目視しながら飛行させる必要がある。
が、無人航空機に搭載されたカメラから機体周辺の映像を確認する、補助者を配置して機体周辺を確認する、など機体を操縦者が目視せずとも無人航空機を操縦する事は可能である。
これを目視外飛行という。
目視外飛行では機体の状況や、障害物、他の航空機等の周囲の状況を直接肉眼で確認することができないので、機体に設置されたカメラや機体の位置、速度、異常等が状態を把握することが必要である。
(2) 目視外飛行のために必要な装備
目視外では補助者が配置され周囲の安全を確認ができる場合に必要な装備があり、補助者が配置できず安全を確認できない場合は更に必要な装備が追加される。
主なものは、
① 目視外飛行において補助者が配置され周囲の安全を確認ができる場合に必要な装備
○ 自動操縦システム及び機体の外の様子が監視できる機体搭載カメラ
○ 機体の高度、速度、位置、不具合状況等状況を地上で監視できる操縦装置
○ 不具合発生時に対応する危機回避機能(フェールセーフ機能)。
② 補助者を配置しない場合に追加する必要のある装備
○ 航空機からの視認性を高める灯火、塗色
○ 機体や地上に設置されたカメラ等により飛行経路全体の航空機の状況が常に確認できること
○ 第三者に危害を加えないことを、製造事業者等が証明した機能
○ 機体の針路、姿勢、高度、速度及び周辺の気象状況等を把握できる操縦装置
○ 計画上の飛行経路と飛行中の機体の位置の差を把握できる操縦装置
![]()
4.3 飛行原理と飛行性能
4.3.1 無人航空機の飛行原理
上述した通り、無人航空機が飛行するためには、重力に対抗する上向きの力を必要とする。
「飛行機」では主翼に発生する揚力で重力に対抗する。また、飛行機には飛行速度と逆向きに空気抵抗である抗力が働くが、それに抗するためにプロペラ等による推力が必要である。
回転翼航空機(ヘリコプター) 及び(マルチローター)は、重力に対抗する上向きの力はプロペラ(ローター)による推力(揚力)によって生み出される。
機体が運動すると、機体には飛行機と同様に抗力も作用するが、推力の大きさを重力以上にし、機体姿勢を変化させてこれに抗する。これら機体に働く力が釣り合ったとき、機体は速度と姿勢を一定とする定常飛行(ホバリングや釣り合い飛行)を行う。
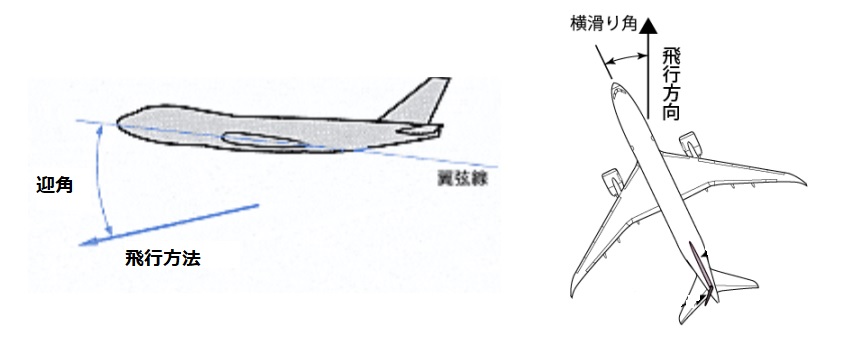
飛行中の航空機に流入する空気の機体に対する角度を迎角と横滑り角で表す。
機体の前後・上下を含む面に空気流入の向きを投影したときに、前後軸とのなす角を迎角という。下方から空気が流入するときに迎角は正である。また、機体の前後・上下を含む面と空気流入の向きの面のなす角を横滑り角という。
一般に迎角(仰角とも)が増すと揚力、抗力ともに増加する。翼の断面形状が上面の湾曲が下面より大きな翼型は、効率よく揚力を発生できるので翼型やローター断面に利用される。しかしながら、あまり大きな迎角にすると、流れは翼の表面から剥離し、揚力は減じ、抗力が増大し、失速(揚力を失う事)を招く。飛行中の飛行機が失速状態に陥ると、機体は急降下を始める。
航空機の姿勢はピッチ、ロール、ヨーとよばれる角度で表現する。
機体の機首を上げ下げする回転がピッチ、ピッチを変化させる舵をエレベーター(昇降舵)、
機体を左右に傾ける回転がロール、ロールを変化させるための舵がエルロン(補助翼)
機体を上から見たときの機首の左右の回転がヨー、ヨーを変化させる舵がラダー(方向舵)
水平状態からのそれぞれの角度をピッチ角、ロール角(バンク角)、ヨー角(方位角)と呼ぶ。
4.3.2 無人航空機へのペイロード搭載
無人航空機には、ペイロードを搭載できない機体を除き、機体ごとに安全に飛行できるペイロードの最大積載量が定められている。ただし、ペイロードの最大積載量とペイロード搭載時の飛行性能は飛行高度、大気状態によっても異なり、また飛行機の場合は離着陸エリアの広さによっても異なる。機体重量 が変化すると航空機の飛行特性(安定性、飛行性能、運動性能)は変化するため注意が必要である。機体の重心位置の変化は飛行特性に大きな影響を及ぼすため、ペイロードの有無によって機体の重心位置が著しく変化しないようにしなければならない。
4.3.3 飛行性能の基本的な計算〔一等〕
カテゴリーIII飛行を行うにあたっては、無人航空機の飛行性能に関わる以下のような基本的な計算 (機体重量、揚力、推力、空気密度、飛行速度、高度、回転翼の回転角速度の関係等)について理解しておく必要がある。
(1) 飛行機の揚力・回転翼航空機の推力
飛行機の水平定常飛行においては、機体重量𝑊 、揚力𝐿 、空気密度𝜌、飛行速度𝑉 の間に以下の関係がある。
𝑊 = 𝐿 ∝ 𝜌𝑉2
∝は「比例」を意味します。プロペラの形状や環境影響を受けるため「イコール」の関係ではありません
プロペラなど回転翼の推力𝑇 は、空気密度𝜌、回転角速度𝜔の間に以下の関係がある。
𝑇 ∝ 𝜌𝜔2
回転翼航空機(ヘリコプター)及び回転翼航空機(マルチローター)のホバリング時には、機体重量𝑊と推力𝑇 は釣り合っている。
𝑊=𝑇
また、回転翼の消費パワー(仕事率)𝑃 は、空気密度𝜌、回転角速度𝜔、推力𝑇 の間に以下の関係がある。
𝑃 ∝ 𝜌𝜔3 ∝ 𝑇𝜔
大気には標準大気が定められており、空気密度は高度に対して以下の表のように変化する。高度が 1000m 増加すると、空気密度は約 0.9 倍になる。
| 高度[m] | 空気密度 [kg/m3] | 高度 0m との比 |
|---|---|---|
| 0 | 1.2250 | 1.00000 |
| 500 | 1.1673 | 0.95287 |
| 1000 | 1.1116 | 0.90746 |
| 1500 | 1.0581 | 0.86373 |
| 2000 | 1.0065 | 0.82162 |
| 2500 | 0.95686 | 0.78111 |
| 3000 | 0.90912 | 0.74214 |
| 3500 | 0.86323 | 0.70468 |
例えば、高度 3000mでの空気密度は高度 0m と比べると、0.74 倍になるため、飛行機が同じ飛行速度で飛行するならば揚力は 0.74 倍になり、√1/0.74 ≒1.16 倍の飛行速度が必要である。回転翼航空機も同様に、プロペラの推力は 0.74 倍になり、同じ重量の回転翼航空機を飛行させるためには1.16 倍のプロペラの回転角速度が必要であり、必要な消費パワーは 1.16 倍になる。
ペイロードが搭載されるなどして飛行機の機体重量が 2 倍になると、2 倍の揚力が必要となり、高度などの他の条件が同じであれば、√2 ≒1.4 倍の機体速度が必要である。回転翼航空機の場合、機体重量が 2 倍になると、2 倍の推力が必要となり、高度などの条件が同じであれば、√2 ≒1.4 倍のプロペラ回転角速度が必要で、消費パワーは√23 ≒2.8倍になる。
飛行機も同様に機体重量が2倍になると揚力が2倍必要になる為、同じ迎角で飛行するためには √2 ≒1.4 倍の飛行速度が必要になる。
(2) 飛行機の旋回半径
飛行機がバンク角(ロール角)𝜙の定常旋回飛行を行うためには、力のつり合いから、水平定常飛行と比べて1/ 𝑐𝑜𝑠𝜙 倍の揚力が必要であり、飛行速度𝑉 、旋回半径𝑟 、重力加速度𝑔 の間に以下の関係がある。
𝑉2/𝑟 =𝑔tan𝜙

例えば、飛行速度 10m/s、バンク角 20°の場合の旋回半径𝑟 は、重力加速度𝑔 ≒ 9.8m/𝑠2、 tan 2 0° ≒ 0.36であるので、以下のように求められる。
𝑟 = 𝑉2/𝑔 tan 𝜙 = 102/9.8 × 0.36 ≒ 28 m
また、cos 2 0° ≒ 0.94であるので、1.06 倍の揚力が必要である。
(3) 飛行機の滑空距離
飛行機の滑空時に飛行経路が水平面となす角を滑空角(降下角)とよぶ。無推力の定常滑空飛行状態での滑空角𝛾は、揚力𝐿 、抗力𝐷 によって以下のように求められる。
tan𝛾 = 1/ (𝐿/𝐷)
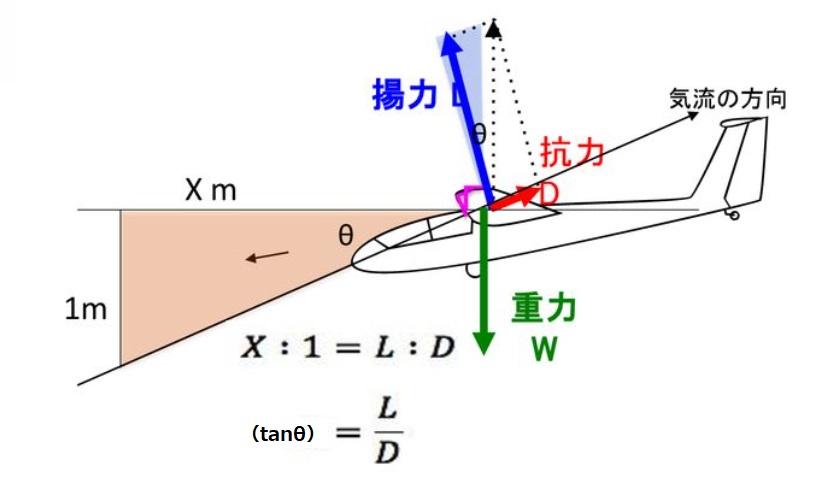
よって、ある高度h からの滑空距離𝑑 は以下のように求められる。
𝑑 = h/tan 𝛾 = h⋅𝐿/𝐷
ここで、𝐿/𝐷 は揚抗比である。
例えば、揚抗比 15 の無推力の定常滑空飛行状態であれば、滑空角𝛾 は
𝛾=tan−1 1 ≒3.8° 15
となり、高度h = 100mからの滑空距離𝑑 は、
𝑑 = 100 × 15 = 1500m
となる。
(4) 水平到達距離(水平投射の場合)
高度hを飛行する飛行速度𝑣の無人航空機が、揚力を失い落下を始める場合を考える。空気抵抗は無視できると仮定すると、落下開始地点から地上に墜落するまでの水平距離𝑥は、
x=vt(tは単位時間[s])
h=gt2/2
2式から t を除去して
𝑥 = 𝑣√2h𝑔
で求めることができる。(𝑔は重力加速度)
>>ネクスト 無人航空機のシステム その2
もはや1家に1台レベル ⁈ 簡単に飛ばせる最高性能のトイドローン「TELLO」!
ドローンの入門機にも、子供のおもちゃにも最適なドローンを低価格で!



コメント