この記事では、ドローン国家資格<学科試験>の公式テキストである
フライトコントロールシステム、送信機、点検・整備(教則P36~P46)について解説します
<誰に対して提供するか)>ドローンの国家資格(無人航空機操縦者技能証明)の学科試験を 高額なスクールや教材を使わずに、無料で独学で勉強しようとしている方へ
<この記事でわかること・解決する問題>
学科試験(無人航空機の飛行の安全に関する教則<国交省公式>)内容のわかりにくい所を、図や実例を用いて分かり易く解説し、「なぜこのような制度なのか?」という理由を掘り下げて解説することを目指す
〇 前回の記事「無人航空機のシステム ~その1」はこちら
◉ 「無人航空機の飛行の安全に関する教則」解説トップページはこちらから
もはや1家に1台レベル ⁈ 簡単に飛ばせる最高性能のトイドローン「TELLO」!
ドローンの入門機にも、子供のおもちゃにも最適なドローンを低価格で!

5. 無人航空機のシステム その2
5.1 フライトコントロールシステム
5.1.1 フライトコントロールシステムの基礎
フライトコントロールシステムは、無人航空機の頭脳に当たる部分。搭載されている各種センサ(GPS、ジャイロ、加速度、方位、高度等) からの情報や送信機から発信された情報を、分析・処理し、機体を制御するための信号を駆動系に送るシステムである。
なお、センサ類は、キャリブレーション(正しく機能するかどうか予め確認しておく事)を必要とするものが多いため、飛行前に各機体で指定された方法でキャリブレーションを行う必要がある。
フライトコントロールシステムを構成する一般的なデバイスには以下のものがある。
| 名称 | 役割 |
|---|---|
| GNSS (Global Navigation Satellite System) | 人工衛星の電波を受信し、機体の地球上での位置・高度を取得するデバイス。(GPSはGNSSの内、米国の衛星システムのこと) |
| ジャイロセンサ | 回転角速度を測定するデバイス。単位時間当たりの回転角度の変化を検出する装置であり、これにより無人航空機の傾きや向きの変化を検出し、フライトコントロールシステムに情報を伝える。 |
| 加速度センサ | 加速度を測定するデバイス。3次元の慣性運動(直行3軸方向の並進運動)、つまり速度変化を検出するセンサである。ジャイロセンサと合わせる事で、機体の高精度な姿勢制御を可能にする。 |
| IMU (Inertial Measurement Unit) | 3軸のジャイロセンサと3方向の加速度センサ等によって3次元の角速度と加速度を検出する装置。また、メーカーによっては気圧センサを含む場合もある。 |
| 地磁気センサ | 機体が向いている方向を地磁気を用いて取得するデバイス。地球の磁力を検出して方位を測定する。 |
| 高度センサ | 地上からの高度を取得するデバイス。主に以下のセンサがある。 ○気圧センサは、気圧の変化を歪みゲージを利用して読み取り、高度を計測する。 〇超音波センサは音波の反射時間から高度を計測する。 ○LiDAR はレーザー光(赤外線)を照射し反射時間から高度を計測す る。 |
| メインコントローラー | GPS などの各種センサの情報と送信機の指令をもとに、機体の姿勢を制御するデバイス。 |
| 送信機(プロポ) | 操作の指令を機体へ送信する、又は機体情報を受信するデバイス。 |
| レシーバー | 送信機の情報を受け取る受信機又は送受信機。 |
5.1.2 無人航空機の主たる構成要素
(1) 無人航空機で使われる電気・電子用語について
電池に関係する用語、単位、求め方及びその概要は以下のとおりである。
| 用語 | 単位 | 計算式 | 概要 |
|---|---|---|---|
| 電圧 | [V] | 抵抗(R)×電流(A) | 電圧は、電池残量(現時点で放電できる電気量)で決まる。電池の残量が減ると電池の電圧は下がる。放電(飛行)中の電圧降下は、電気回路の配線抵抗とバッテリーの内部抵抗によって決まる。 □ 容量と同様に、電流や温度によってエネルギー容量は変化する。 |
| 出力 | [W] | 電圧(V)×電流(A) | 単位時間当たりのエネルギー量を表す。 出力が一定の場合、電池残量が少なくなると、放電時電圧が低下するため、電流は増大する。 |
| 電気容量 | [Ah] | 電流(A)×時間(h) | 満充電から、電圧が決められた最低電圧 (終止電圧)になるまでの間に、利用できる電気量。 放電時の電流の大きさや温度によって、利用可能な容量は変化する。 |
| エネルギー容 量 | [Wh] | 放電時電圧(V)×電流(A)×時間(h) | □ 容量と同様に、電流や温度によってエネルギー容量は変化する。 |
| 充電率 | [%] | (現電気量Ah) /(満電気量Ah) | 満充電で放電できる電気量と現時点で放電できる電気量の比率を表す。 0%は仕様上の完全放電状態を、100%は満充電状態を表す。 |
(2) モーター、ローター、プロペラについて
電動の無人航空機において、ローター(プロペラ)を駆動するモーターには、ブラシモーターとブラシレスモーターがある。
ブラシレスモーターの特徴は、メンテナンスが容易(モーター内部の清掃、ブラシの交換が不要 等)、静音、長寿命であることが挙げられる。
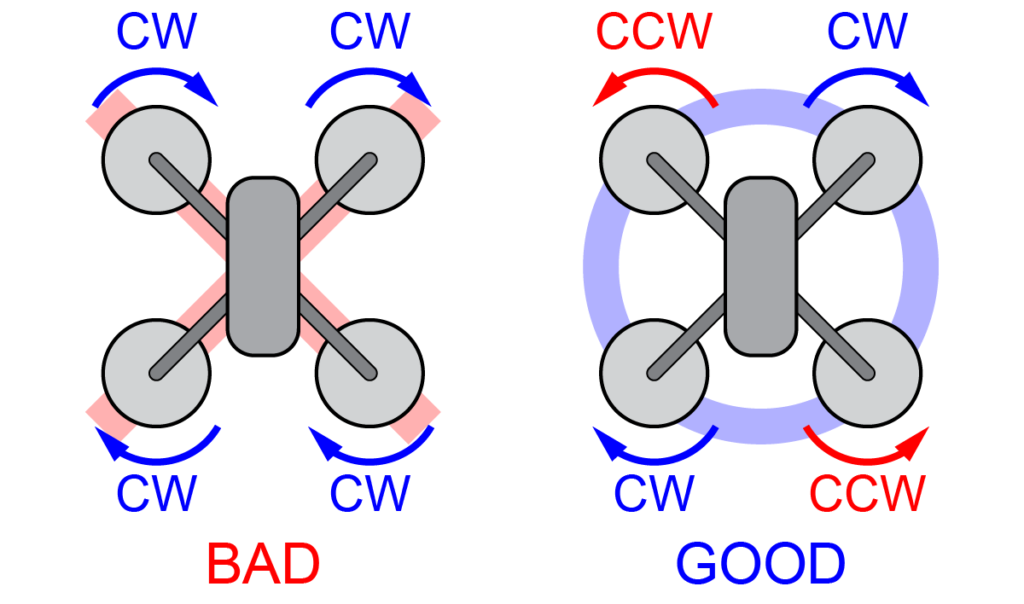
ローターは通常回転方向(時計回転(CW:クロックワイズ)/反時計回転(CCW:カウンタークロックワイズ))に合わせた形状となっており、モーターの回転方向に合わせて取り付けるよう注意が必要である。
(3) モーター制御について
モーターの回転数は ESC(エレクトロニックスピードコントローラー)により制御されており、モーターで駆動されたローターの回転数を増減させることにより揚力や推力を変化させている。
5.1.3 送信機(プロポ)
(1) 送信機から無人航空機へ送信される指令の流れ
無人航空機への指令は送信機(プロポ)から機体へ送られる。機体では、受信機が指令を受け取りメインコントローラーからモーター又はサーボを駆動させ機体を操縦している。
(2) 送信機の信号について〔一等〕
送信機の信号は、同周波数帯が密集しているような場所では電波混信による誤作動が起きる可能性がある。予防として飛行させる前に測定器などで周辺の電波の状態を確認することが望ましい。無人航空機で使用される送信機からの電波だけでなく、無線LANやWi‐Fi、 高圧送電線の影響を受ける場合もあるため、周辺環境の確認が必要である。
(3) 送信機の操縦と機能について
無人航空機は、送信機のスティックを操作して、機体の重心を中心とする 3 軸の回転(ピッチ(機首を上下する回転)、ロール(機体を左右に傾ける回転)、ヨー(機首の左右への旋回))やローターの推力の増減といった機体の動きの制御を行う。
以下のとおりスティック操作による機体の動きの割り当てはモードにより異なる。また、スティックのニュートラル位置を調整するためのトリムスイッチがある場合もある。
<回転翼航空機の場合>

| 操縦舵の名前 | 機体の動作 | 対応するプロポの操作 |
|---|---|---|
| スロットル | ローターの推力(揚力)の増減(機体の上昇・降下) | (モード1)右側スティックの上下操作 (モード2)左側スティックの上下操作 |
| エレベーター | ピッチ方向の操作 (機体の前後移動) | (モード1)左側スティックの上下操作 (モード2)右側スティックの上下操作 |
| エルロン | ロール方向の操作 (機体の左右移動) | (モード 1/モード 2)右側スティックの左右操作 |
| ラダー | ヨー方向の操作(機首の左右旋回) | (モード 1/モード 2)左側スティックの左右操作 |
< 飛行機の場合 > …回転翼機と以下の点が異なることに注意
スロットル (プロペラの推力の増減) → 機体の前後移動
エレベーター (ピッチ方向の操作) → 機体の上昇・降下
エルロン (ロール方向の操作) → 機体の旋回
5.1.4 機体の動力源
(1) 機体の動力源について
無人航空機の機体の動力源として主に、電動かエンジンが使用されている。電動機のメリットは、振動、 騒音が少ないため軽量化できる、対して飛行時間が短いというデメリットがある。
エンジン機のメリットは、飛行時間が長く長距離飛行が可能であるが、大型になりやすくエンジンによる騒音が電動に比べ大きいというデメリットがある。
(2) バッテリーの種類と特徴
1) リチウムポリマーバッテリー
多くの無人航空機に使用されている、リチウムポリマーバッテリー(リポバッテリー)には、エネルギー密度が高い・電圧が高い(=小さくても大電流を出力可能)、自己放電が少ない、メモリ効果が小さい、電解質が可燃物である等の特徴がある。
※メモリ効果…バッテリーを完全に使い切らずに充電すると、継ぎ足し充電した際の残量を記憶し起電力が低下して容量が減少したように見えてしまう現象。
2) リチウムポリマーバッテリーの取り扱い上の注意点
リチウムポリマーバッテリーの取り扱い上の注意点として以下ものが挙げられる。
充電器は満充電になると充電を停止するが、過充電となる場合がある。
過放電や過充電を行うと、急速に劣化が進み、寿命が短くなる。
過放電や過充電の状態では、通常利用時よりも多くのガスがバッテリー内部に発生し、バッテリーを膨らませる原因となる。
バッテリーが強い衝撃を受けた場合、発火する可能性がある。
バッテリーのコネクタの端子が短絡した場合、発火する可能性がある。
3) 複数のセルで構成されたリチウムポリマーバッテリーの取扱上の注意
セル間の充電量のバランスを補正しながら充電する(バランス充電)が重要である。バランスが著しく崩れたまま充電を行うとセル間の電圧差が生じ、セルによって過放電となる現象が起こり、急速に劣化が進む。そのため、セル間の充電量のバランスをとるバランスコネクタがついているタイプは、充電時にそのコネクタを充電器へ接続することが重要である。
4) リチウムポリマーバッテリーの保管方法
リチウムポリマーバッテリーの保管方法における主な留意点は以下のとおり。
バッテリーの劣化を遅らせるため、長期間使用しない時は充電 60%を目安に保管すること。
満充電の状態での保管、過放電状態での保管は、電池の劣化が進みやすく電池が膨らみ、使用不可になるので行わないこと。
機体コネクタとバッテリーを接続したままにすると、短絡して発火する危険があるため、使用後は機体からバッテリーを取り外して保管すること。
万が一発火しても安全を保てる不燃性のケースに入れて保管すること。
ぶつけたり落下させるなど衝撃を与えないこと。
水に濡らさないこと。
バッテリーを高温(35°c 超)になる環境で保管しないこと。夏場の車両内や日当たりの良い場所での保管は避ける。
5) リチウムポリマーバッテリーの交換
リチウムポリマーバッテリーが膨らんでいる場合は、過充電などでバッテリー内部に可燃性ガスが発生している可能性があるため、早めに交換を行う。
6) リチウムポリマーバッテリーの廃棄方法
無人航空機の運航で生じる廃棄物は、各地方自治体のルールに従って廃棄しなければならない。事業で用いたリチウムポリマーバッテリーを廃棄する場合は、法律に則り「産業廃棄物」として廃棄する。
(3) エンジンについて
エンジン機は、エンジンの回転を動力にローターを回転させ揚力と推力を得ている。
エンジンには 2 ストロークエンジン、4 ストロークエンジン、グローエンジン等の種類がある。エンジンの種類により、潤滑方式、燃焼サイクル、点火温度等が異なる。燃料にも種類があり、それぞれのエンジンでメーカーが指定する燃料を適切に扱う必要がある。燃料にオイル等を混ぜた混合燃料を使用する場合は、適切な混合比での使用が必要である。
5.1.5 物件投下のために装備される機器
無人航空機で物件投下する機器は、救命機器等を機体から落下させる装置や農薬散布のために液体や粒剤を散布する装置などがあり、また、意図せず物件が落下しない構造となっている。投下装置の多くは、搭載位置や対象物や手順などが定められているため、各投下装置の特性と機能を熟知しなければならない。特に、物件投下用のウインチ機構で吊り下げる場合は、物件の揺れ、投下前後の重心の変化に注意しなければならない。
農薬散布する装置の多くは、それぞれ決められた飛行速度、飛行高度などが定められている。ただし、 風などの影響で対象区域より飛散する可能性があるため、第三者や第三者の土地に農薬が誤散布しないよう充分に配慮する事。
5.1.6 機体又はバッテリーの故障及び事故の分析
(1) 機体の故障や事故の分析について〔一等〕
無人航空機の多くは、機体の異常情報を機体本体または送信機のランプや音などで知らせる機能を有している。また、飛行軌跡や機体の情報(フライトデータ)を記録している機種もあり、事故の原因分析を詳細に確認することも可能である。事故や故障の原因調査は、機体や飛行の安全性を向上させる重要な要素であるので、フライトデータを記録することが推奨される。
(2) リチウムポリマーバッテリーに関わる電気的なトラブル〔一等〕
リチウムポリマーバッテリーに関わる主な電気的トラブルを以下に示す。
満充電のリチウムポリマーバッテリーを使用し無人航空機を急上昇させた場合、直後にバッテリー残量が大きく減少する事があるが、これはバッテリーから大きな電流が流れることで、一時的な電圧低下が生じることが原因である。
冬季は、低気温では放電能力が極端に低下するため飛行時間が半減することがある
リチウムポリマーバッテリーは高密度なエネルギーを大容量で出力できるが、バッテリー残量が減り、電圧低下してくると急激に出力が弱くなり、墜落の原因となるので注意する。バッテリー残量ギリギリまでの飛行は控え、30〜40%程度でのバッテリー交換を心掛ける。
![]()
5.2 機体以外の要素技術
5.2.1 電波
(1) 電波の特性
1) 直進、反射、屈折、回折、干渉、減衰
電波の性質の種類と特徴は以下のとおりである。電波には障害物等の後ろに回り込む回折という性質、異なる媒質にぶつかると透過、反射あるいは屈折する性質、周波数の近い電波が重なると電波干渉が発生しお互いを減衰させる性質などがある。2.4GHz の電波は回折しにくく直進性が高いため障害物の影響を受けやすくなる。
| 電波の性質 | 特徴 |
|---|---|
| 直進 | 電波は、進行方向に障害物が無い場合は直進する。 |
| 反射/屈折 | 電波は、2つの異なる媒質間を進行するとき、反射や屈折が起こる。 常に反射の法則(入射角と反射角の大きさは等しい)が成り立つ。 |
| 回折 | 電波は、周波数が低い(波長が長い)ほど、より障害物を回り込むことができるようになる。 |
| 干渉 | 電波は、2つ以上の波が重なると、強め合ったり、弱め合ったりする。 |
| 減衰 | 電波は、進行距離の2乗に反比例する形で電力密度が減少する(距離2倍→電力密度は 1/4 )。 周波数により特性は異なるものの、電波は水中では吸収されて大きく減衰される。 |
2) マルチパス
送信アンテナから放射された電波が山や建物などによる反射、屈折等により複数の経路を通って伝搬される現象をマルチパスという。
反射屈折した電波は、到達するまでにわずかな遅れを生じ、一時的に 操縦不能になる要因の一つとなっている。マルチパスによって電波が弱くなり一時的に操縦不能になった場合は送信機をできるだけ高い位置に持ちアンテナの向きを変えて操縦の復帰を試みる。

3) フレネルゾーン
フレネルゾーンとは、無線通信などで、電力損失をすることなく電波が到達するために必要な領域のことをいう。無線通信での「見通しが良い」という表現は、フレネルゾーンがしっかり確保されている状態であることを意味する。
フレネルゾーンは、送信と受信のアンテナ間の最短距離を中心とした楕円体の空間。
電波伝搬において重要なのは第 1 フレネルゾーンと呼ばれる部分であり、このゾーン内に壁や建物などの障害物があると、受信電界強度が確保されず通信エラーが起こり、障害物がない状態に比べて通信距離が短くなる。
フレネルゾーン半径は周波数が高く(波長が短く)、送受信機間距離が短くなればなるほど小さくなる(2.4 – 5.7 GHz 帯の場合、2 地点が 100m 離れたケースでは 半径2m 以下)。地面も障害物となるため、フレネルゾーンの半径を考慮してアンテナの高さを十分に確保する必要がある。
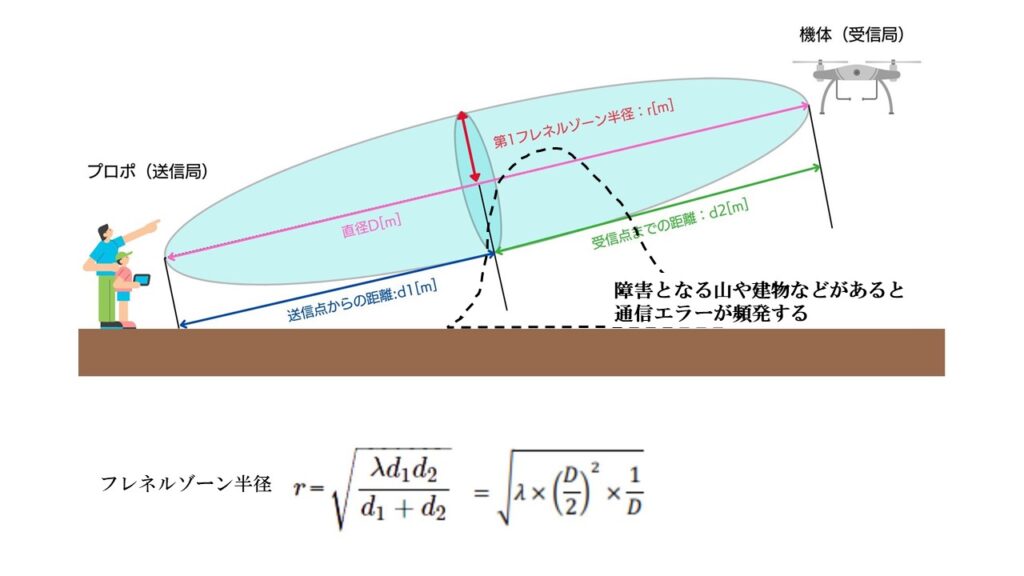
1) フレネルゾーン半径と必要なアンテナの高さ[1等]
カテゴリーIII飛行を行うにあたっては、電波と通信に関わる基本的な計算(周波数帯や送受信間距離 を踏まえ必要となるアンテナの高さ等)について理解しておく必要がある。
フレネルゾーンの半径:R(m)、送受信アンテナ間距離:D(m)、使用周波数f(Hz)、波長:λ(m) と すると、これらの間には以下の関係がある。
𝑅= √ (𝜆×(𝐷/2)2×1/𝐷) = √(𝜆𝐷/4)
<練習問題>
送受信アンテナ間距離:100m 、使用周波数:2.4GHz のときのフレネルゾーンの半径を上記式を用いて算出する
〇 送受信アンテナ間距離:D=100m
〇 使用周波数:f=2.4×109Hz GHzの(G)は1,000,000,000=1.0×109
〇 波長λ:波長と周波数と速度の関係式 λ = f/C より ※Cは光速 3.0×108m/s
λ=(3×108)÷(2.4×109)=0.125 mと求めることができる。
以上より、フレネルゾーンの半径 R は、
𝑅=√(𝜆𝐷/4)=√(0.125 ×100÷4)≒1.77 𝑚
よって理想的なアンテナの高さは 1.77m以上となる。
なお、実際にはフレネルゾーン半径の 60%以上のアンテナ高さが確保できていれば、フレネルゾーン に障害物がない場合と同等の通信品質を確保できるといわれている。この条件にて必要なアンテナの高さを計算すると、1.77×0.6≒1.1m以上となる。
(2) 無人航空機の運航において使用されている電波の周波数帯・用途
無人航空機の運航において使用されている主な電波の周波数帯は、低い順に、73MHz 帯、169MHz 帯、920MHz 帯、2.4GHz 帯、5.7GHz 帯、 である。電波の周波数帯や出力、使用するアンテナの特性、変調方式、伝送速度などによって通信可能な距離は変動する。
一般的なマルチコプターでは2.4GHz帯がよく使用されている。169MHz 帯は主に 2.4GHz 帯及び5.7GHz 帯の無人移動体画像伝送システムの無線局のバックアップ回線として使用される。
(3) 無人航空機以外も含めた日本の電波の利用状況〔一等〕
電波の特性として、
〇波長が長い → 直進性が弱く情報伝達容量が小さくなるが減衰はしにくい。
〇波長が短い → 直進性が強く情報伝達容量が大きくなるが減衰はしやすい。
無人航空機の制御用通信に多く使用される極超短波(10cm~1mの波長=周波数 300MHz~ 3GHz)は、多少山や建物の陰には回り込んで伝わることができる。伝送できる情報量が大きく、小型のアンテナと送受信設備で通信できることから、携帯電話や業務用無線、アマチュア無線、無人航空機、地上デジタルTV、空港監視レーダー、電子タグ、電子レンジ等、幅広く利用される。
対して、更に波長が短いマイクロ波(1~10cmの波長=周波数 3~30GHz)で、直進性が強い性質を持つため特定の方向に向けて発射するのに適している。伝送できる情報量も非常に大きいことから、衛星通信、衛星放送や無人航空機の画像伝送、無線LANに利用される。レーダーもマイクロ波の直進性を活用したシステムで、 気象レーダーや船舶用レーダー等に利用される。
(4) 電波の送信、受信に関わる基本的な技術
送信機のアンテナから発射される電波の強さは、方向により異なる(無指向性のアンテナの場合は、アンテナの周囲に対して同様に発射される)。アンテナの角度は調整できるので、操縦時の送信機の持ち方や無人航空機の位置を考慮して最適なアンテナ角度を設定する必要がある。
(5) 電波の特性に伴って発生する運航上のトラブルの調査・分析〔一等〕
外来電波や他の設備・機器からのノイズにより無線設備の通信環境が不安定(混信)になることがある。電波環境の調査として、スペクトラムアナライザを用いて、使用している周波数と同じ電波が現地エリアで使用されている状況や、他の設備・機器からノイズが発生していないかを確認する方法がある。様々な無線局が散在する市街地での飛行のためには、電波環境の調査は非常に重要である。
![]()
5.2.2 磁気方位
(1) 地磁気センサの役割について
地磁気センサにより、地球の磁気を検出することで機体の向き(方位)や姿勢を知ることができる。地磁気センサは正常な方位を計測しない場合があるが、それは磁力線が示す北(磁北)と地図の北にわずかなズレ(偏角)が生じるためである。
(2) 飛行環境において磁気に注意すべき構造物や環境について
地磁気には、鉄や電流が影響を与える。そういったものが多く存在する環境下の飛行では、機体の姿勢や進行方向に影響を与える場合がある。
一般的に、高圧線や変電所、電波塔、鉄材を多く使用された建物、新幹線や電車の鉄道、自動車、鉄板など鉄材が多く埋め込まれた場所などがあげられる。
(3) 無人航空機の磁気キャリブレーションについて
無人航空機の磁気(コンパス)キャリブレーションとは、飛行前にその場所の地磁気を検出して方位を取得し、 GNSS 機能やメインコントローラーに認識させることである。磁気キャリブレーションが正しく行われていないと、機体が操縦者の意図しない方向へ飛行する可能性がある。飛行させる場所により、地磁気の方向は異なるので、磁気キャリブレーションを都度行うことが重要である。
5.2.3 GNSS
(1) GNSS について
無人航空機に用いられる技術であるGNSS(Global Navigation Satellite System/全球測位衛星システム) とは、地球の周りを回っている人工衛星から信号を利用して、地球上のどの位置にいるかを調べるシステムのことである。
GNSS受信機を取り付けた機器が衛星からの信号を受信することでその位置を計算することができる。位置を計算するためには最低4基以上の人工衛星からの距離を同時に知ることが必要であり、安定飛行のためにはより多くの人工衛星から信号を受信することが望ましい。
よく知られるGPS(Global Positioning System)は、アメリカ国防総省が航空機等の航法支援用として開発したシステムである。ロシアは GLONASS、欧州は Galileo、日本は準天頂衛星 QZSS をそれぞれ運用している。
(2) GNSS と RTK の精度
GPS 測位での受信機 1 台の単独測位の精度は数十mと粗い精度である。そのため、精度向上を目的として、固定局と移動局の2つの受信機を使用するRTK(Real Time Kinematic)や DGPS(Differential Global Positioning System)などの測位方式技術が確立され、これらの測位方式は cm~数 m レベルの精度の高い測位が可能である。
(3) GNSS を使用した飛行における注意事項について
GNSSは無人航空機の航空に重要なものであるが、自動操縦では手動操作よりも高精度な GNSS 測位が必要である。自動操縦のためにあらかじめ地図上で設定した飛行ルート は GNSS の測位精度の影響を受けるため、精度が悪化した場合は実際の飛行経路の誤差が大きくなってしまう。
GNSS の測位精度に影響を及ぼすものとしては、GNSS 衛星時計の精度、捕捉している GNSS衛星の数、障害物などによるマルチパス、受信環境のノイズなどが挙げられる。受信機は、周囲の地形や 障害物の状況を考慮して設置する必要がある。一般的に位置精度は、水平方向に比べ高度方向の誤差が大きくなる。
![]()
5.3 機体の整備・点検・保管・交換・廃棄
5.3.1 電動機における整備・点検・保管・交換・廃棄
無人航空機の運航者は、飛行前・飛行後、さらに無人航空機毎に定められた一定の期間、一定の総飛行時間ごとに整備点検を行う必要がある。
そのため、各機体メーカーが設定する整備内容を熟知し、必要なタイミングで修理等の整備を行う必要がある。
5.3.2 エンジン機における整備・点検
エンジン機においては、飛行前後以外に一定の期間又は一定の総飛行時間毎に、メーカーが定めた整備項目を整備手順に従って実施する。運航者のエンジンの整備に関する知識及び技能が不足している場合は、 専門の整備業者に依頼する。
>>ネクスト 無人航空機の操縦者、および運航体制
コスパ最強!入門機からプロの空撮まで使われている「DJI mini2」をリーズナブルな価格で!


コメント