
この記事では、ドローン国家資格<学科試験>の公式テキストである
無人航空機の操縦者及び運航体制(教則P58~P74)について解説します
<誰に対して提供するか)>ドローンの国家資格(無人航空機操縦者技能証明)の学科試験を 高額なスクールや教材を使わずに、無料で独学で勉強しようとしている方へ
<この記事でわかること・解決する問題>
学科試験(無人航空機の飛行の安全に関する教則<国交省公式>)内容のわかりにくい所を、図や実例を用いて分かり易く解説し、「なぜこのような制度なのか?」という理由を掘り下げて解説することを目指す
〇 前回の記事「無人航空機の操縦者,及び運航体制」はこちら
◉ 「無人航空機の飛行の安全に関する教則」解説トップページはこちらから
コスパ最強!入門機からプロの空撮まで使われている「DJI mini2」をリーズナブルな価格で!

7. 無人航空機の運航上のリスク管理
7.1 運航リスクの評価及び最適な運航の計画の立案の基礎
7.1.1 安全に配慮した飛行

無人航空機の飛行にあたっては、法令等に基づく基準や要件に適合させるのは当然だが、様々な要
素により、飛行中、操縦が困難になること、又は予期せぬ機体故障等が発生する場合があることから、運航者は運航上の「リスク」を管理することが安全確保上非常に重要である。
運航者は行おうとする運航の形態に応じ、事故等につながりかねない危険性のある要素(ハザード)を具体的に可能な限り多く特定し、それによって生じる運行上の事故発生可能性「リスク」を評価したうえで、「リスク」の発生確率を低減させたり、「リスク」の結果となる被害を軽減したりする措置を講じることで、「リスク」を許容可能な程度まで低減する必要がある。
このようなリスク管理の考え方は、特にカテゴリーⅢ飛行において重要となるが、その他の飛行におい
ても十分に理解したうえで、安全に配慮した計画や飛行を行うことが求められる。
(1) 安全確保のための基礎
1) 安全マージン
飛行を行う際は、原則として飛行空域に安全マージン(有余距離)を加えた範囲で実施する。
飛行経路を考慮し、周辺及び上方に障害物がない水平な場所を離着陸場所と設定する。
緊急時などに一時的な着陸が可能なスペースを、前もって確認・確保しておく。
飛行領域に危険半径(高度と同じ数値又は 30mのいずれか長い方)を加えた範囲を、立入管
理措置を講じて無人地帯とした後、飛行する。
2) 飛行の逸脱防止
飛行の逸脱を防止するためには、以下の事項を行うことが有効である。
ジオフェンス機能を使用することにより、飛行禁止空域を設定する。
→ 無人航空機の飛行システム上で設定する架空の制限ラインであり、そのラインより外側への飛行ができなくなる
衝突防止機能として無人航空機に取り付けたセンサを用いて、周囲の障害物を認識・回避する。
→障害物検知機能が相当する。上下左右前後6方向に検知センサーがあればベスト。
3) 安全を確保するための運航体制
安全を確保するための運航体制として、操縦者のほかに、操縦と安全管理の役割を分割させる目的で操安全管理者(運航管理者)、操縦者を補助し必要な情報を与えるとともに、周囲の安全を管理する目的で補助者を配置することが望ましい。
7.1.2 飛行計画
(1) 飛行計画策定時の確認事項について
飛行計画では、無人航空機の飛行経路・飛行範囲を決定し、無人航空機を運航するにあたって、自治体など各関係者・権利者への周知や承諾が必要となる場合がある。
飛行計画策定時は、機体の物理的障害や飛行範囲特有の現象、制度面での規制、事前に予想しうる状況の変化などを想定した確認事項の作成が求められる。留意するポイントとしては、
・飛行経路や日時において緊急用務空域の発令など、一時的な飛行規制の対象空域の該当となっていないか
・離着陸場は、人の立ち入りや騒音、障害となる構造物がないか
・飛行経路の設定は、高圧電線などの電力施設が近くにないか、ドクターヘリ等航空機の往来がないか
・離陸地点と着陸予定地点の距離関係から別途事前に緊急着陸地点を確保しておくべきか 等
飛行計画の全ての工程において安全管理が優先され、離陸前、離陸時、計画経路の飛行、着陸時、着陸後の状況に応じた安全対策を講じ、飛行の目的を果たす飛行計画の策定が求められる
(2) 事故・インシデントへの対応について
無人航空機の運航中に万が一事故やインシデントが発生した場合を想定し、事前に緊急連絡先を定義しておく。負傷者や第三者物件への物損が発生した場合は直ちに当該無人航空機の飛行を中止するとともに、人命救助を最優先に行動し、速やかに消防署や警察に連絡するなど危険を防止するための必要な措置を講じなければならない。
また「無人航空機の事故及び重大インシデントの報告要領」に従って、速やかに国土交通大臣に事故等の報告をしなければならない。
(3) カテゴリーⅢ飛行に追加となる安全確保[1等]
地上の第三者への被害の可能性を低減させる対策として、必要最低限の数より多くのプロペラ及びモーターを有するなど、適切な冗長性を備えた機体を使用する
地上の第三者への被害の可能性を低減させる対策として、パラシュートを展開するなど、落下時の衝撃エネルギーを軽減できる機能を有する機体を使用する
7.1.3 経路設定

(1) 飛行経路の安全な設定について
飛行経路は、無人航空機が飛行する高度と経路において、障害となる建物や木々、鳥などの妨害から避けられるよう設定する。障害物付近を飛行せざるを得ない経路を設定する際は機体の性能に応じて安全な距離を保つように心がける。
操縦者の目視が限界域付近となる飛行では、付近の障害物との距離差が曖昧になりやすいため、事
前に飛行経路付近の障害物との距離を現地で確認し、必要と判断した場合は補助者を配置することが
望ましい。
(2) カテゴリーⅢ飛行において追加となる経路設定の注意点について〔一等〕
カテゴリーⅢ飛行においては、飛行形態に応じてリスクの分析及び評価を行い、その結果に基づき、地上リスクと空中リスクの両方に関し、逸脱や墜落を想定し異常事態時におけるリスク軽減策を講じる必要がある。具体的な対策の例は以下のとおり。
可能な範囲第三者が立ち入りにくい少ない飛行経路を設定する。
飛行経路上で緊急着陸地点や不時着エリアを予め設定する。
フェールセーフ機能の発動と安全対策は、飛行経路からの逸脱防止(ジオフェンス機能)動作及び対策手順を設定する。
ジオフェンス機能設定において、他の航空機との空域調整結果が反映されていることを確認する。
なお、これらに必要となる機体の機能や安全対策は事前に検証が必要である。
7.1.4 無人航空機の運航におけるハザードとリスク

無人航空機の運航において、
「ハザード」…事故等につながる可能性のある危険要素(潜在的なものを含む)をいう。
「リスク」…無人航空機の運航の安全に影響を与える何らかの事象が発生する可能性をいう。予測される頻度(被害の発生確率)と結果の重大性(被害の大きさ)により大きさを示す。
7.1.5 無人航空機の運航リスクの評価
無人航空機の飛行にあたって、リスク評価とその結果に基づくリスク軽減策の検討は非常に重要。すなわち、運航形態に応じ、
□ 事故等につながりかねない具体的な「ハザード」を可能な限り多く特定し、
□ それによって生じる「リスク」を評価したうえで、リスクを許容可能な程度まで低減する。
リスクを低減するためには、
①事象の発生確率を低減するか、
②事象発生による被害を軽減するか、
の両方を検討したうえで必要な対策をとる。
例えば、機材不具合というハザードによる墜落というリスクに対しては、機材不具合の可能性を低減するために信頼性の高い機材を使用(上記①)したり、墜落時にパラシュートにより地上の被害を低減(上記②)したりなどの対策が考えられる。
無人航空機が制御不能な状態に陥った時、人と衝突し、重大な障害を引き起こす可能性がある。
運航者は、無人航空機の運航におけるリスク評価(安全な運航の計画、リスク分析と評価、リスク軽減策の実施、飛行の実施等)を行う必要がある。
□ 飛行計画上の地上(又は水上)の人が、無人航空機により受ける恐れのある被害(地上リスク)の把握を行う
□ リスクに曝される第三者の人数、及び衝突の際の衝撃を減らすための適切な措置の実施
□ 無人航空機が制御不能になった場合に備えて設定する緊急事態への対応手順及び計画の有効性について確認する
□ 無人航空機と有人航空機との空中衝突に関するリスク(空中リスク)についても把握を行い、衝突を回避するための適切な措置等を実施することも。

7.2 カテゴリーⅢ飛行におけるリスク評価の基本的な考え方〔一等〕
第三者上空を飛行するカテゴリーⅢ飛行は、万一墜落等の事故が生じた場合には、人の生命及び身体に甚大な被害をもたらすリスクの高い飛行となることから、厳格に安全を確保する必要がある。
このため、一等無人航空機操縦士の技能証明を受けた者が第一種機体認証を受けた無人航空機を飛行させることに加え、あらかじめ、その運航の管理が適切に行われることについて国による飛行の許可・承認を受けることが必要となる。
具体的には、
①飛行形態に応じてリスクの分析及び評価を行い、
②その結果に基づくリスク軽減策を運航の計画に適切に反映することにより
③最適な運航の計画を立案し、飛行の安全を確保する講じる
④無人航空機を飛行させる際の適切な運航管理の体制を維持するため、飛行マニュアルを作成・遵守する(リスク評価結果に基づくリスク軽減策の内容等を記載)ことが求められる。
下記(7.2.1)において「無人航空機の飛行に関する許可・承認の審査要領(カテゴリーⅢ飛行)」におけるリスク評価の基本的な考え方を、
(7.2.2)においてリスク評価手法の 1 つである「安全確保措置検討のための無人航空機の運航リスク評価ガイドライン」(公益財団法人福島イノベーション・コースト構想推進機構 福島ロボットテストフィールド発行)(以下「リスク評価ガイドライン」という。)の概要をそれぞれ示す。
7.2.1 カテゴリーⅢ飛行におけるリスク評価の基本的な考え方〔一等〕

1) リスク分析及び評価において考慮すべき事項
「無人航空機の飛行に関する許可・承認の審査要領(カテゴリーⅢ飛行)」においては、国による飛行
の許可・承認を受けるための申請を行う場合には、飛行形態に応じてリスクの分析及び評価を行い、そ
の結果を提出することを求めている。リスクの分析及び評価において考慮すべき事項は少なくとも以下
を含むこととしている。
① 次の事項を含む運航計画
・飛行の日時
・飛行する空域及びその地域
・無人航空機を飛行させる者及び運航体制
・使用する無人航空機
・飛行の目的
・飛行の方法
② 飛行経路における人との衝突リスク(地上リスク)及び航空機との衝突リスク(空中リスク)
③ 電波環境(無線通信ネットワークを利用して操縦を行う場合に限る。)
④ 使用条件等指定書で指定された使用の条件等、使用する無人航空機の情報
⑤ 無人航空機を飛行させる者の無人航空機操縦者技能証明及び訓練の内容
⑥ 無人航空機を飛行させる者を補助する者等を含めた運航体制
2) リスク軽減策を記載した飛行マニュアル
無人航空機を飛行させる際の適切な運航管理の体制を維持するため、リスク評価の結果に基づくリスク軽減策の内容を記載した飛行マニュアルの作成・遵守をすることが求められる。当該飛行マニュアルに記載する事項として例えば以下のようなものがある。
| ① 無人航空機の点検・整備 | 無人航空機の機能及び性能に関する基準に適合した状態を維持するため、次に掲げる事項に留意して、機体の点検・整備の方法を記載する。 ・機体の点検・整備の方法 ・機体の点検・整備の記録の作成方法 ・整備の実施・責任体制の明確化 |
| ② 無人航空機を飛行させる者の訓練 | 無人航空機を飛行させる者の飛行経歴、知識及び能力を確保・維持するため、次に掲げる事項に留意して、無人航空機を飛行させる者の訓練方法等を記載する。 ・無人航空機を飛行させる者の資格に関する事項 ・知識及び能力を習得するための訓練方法 ・知識及び能力を維持させるための訓練方法 ・飛行記録(訓練を含む。)の作成方法 ・無人航空機を飛行させる者が遵守しなければならない事項 ・訓練の実施・管理体制の明確化 |
| ③ 無人航空機を飛行させる際の安全を確保するために必要な体制 | 次に掲げる事項に留意して、安全を確保するために必要な体制を記載する。 ・飛行前の安全確認の方法 ・無人航空機を飛行させる際の安全管理体制 ・事故等の報告要領に定める事態への対応及び連絡体制 |
7.2.2 リスク評価ガイドラインによるリスク評価手法〔一等〕
「無人航空機の飛行に関する許可・承認の審査要領(カテゴリーⅢ飛行)」においては、リスク評価ガイドラインによるリスク評価手法を活用することが推奨されている。
リスク評価ガイドラインは、国際的な無人機システムの安全に関する検「JARUS」(Joint Authorities for Rulemaking of Unmanned Systems) で話し合われた SORA (SpecificOperations Risk Assessment)という考え方を参考に作成したものである。ここでは、リスク評価ガイドラインによるリスク評価手法の概要を記載するが、詳細についてはリスク評価ガイドラインを参照すること。

1) リスク評価のための基本的なコンセプト
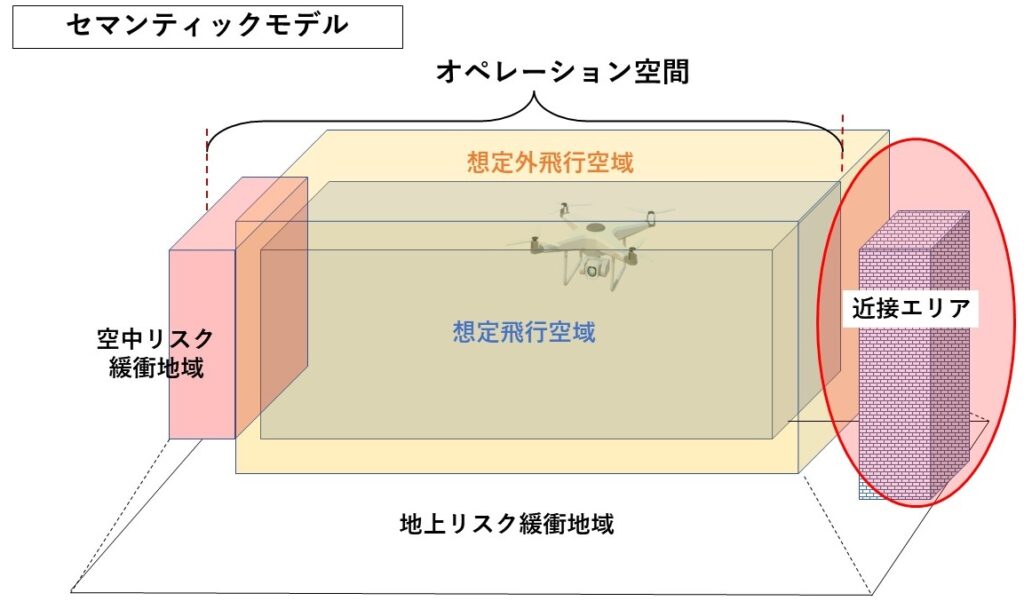
a. セマンティックモデル(想定飛行空間と想定外飛行空間)
「想定飛行空間」は、無人航空機の飛行の目的や、機体やシステムの性能、環境に応じて設定される
飛行範囲である。機体や外部システムの異常・外乱の影響で想定飛行空間を外れて飛行してしまうこと
に備える空間として「想定外飛行空間」を設定する。
無人航空機の運航が正常に制御できている正常運航時は、標準運航手順に従って飛行を行う。機体
や外部システムの異常・外乱の影響で想定飛行空間から外れてしまうおそれ、又は外れてしまった異常
事態では、直ちに「異常対応手順」へと移る。異常対応手順により想定飛行空間へと復旧するのに必要
な飛行空間を想定外飛行空間として確保する。想定飛行空間と想定外飛行空間を合わせたものが「オペレーション空間」であり、その空間から万一外れてしまった緊急事態では、直ちに「緊急時対応手順」と「緊急時対応計画」を実行する。
飛行の地上リスクを検討する際には、オペレーション空間からさらに安全マージンとしての「地上リス
ク緩衝地域」を合わせた範囲を検討し、そのリスクを一定の範囲まで低減するように計画する。飛行の
空中リスクを検討する際には、オペレーション空間からさらに任意で「空中リスク緩衝空域」を合わせた範囲を検討し、そのリスクを一定の範囲まで低減するように計画する。
「隣接エリア」は、オペレーション空間並びに地上リスク緩衝地域及び空中リスク緩衝空域に隣接する
区域であり、無人航空機が制御不能な形で進入してしまった場合に高いリスクが想定される場合には、
隣接エリアに進入しないための対策を検討する。
b. ロバスト性(安全確保に必要とされる安全性の水準及び保証の水準)
安全確保措置を計画するに当たって、ロバスト性は重要な概念であり、安全確保措置により得られる
「安全性の水準」(安全性の増加)と、計画されている安全性の確保が確実に実施されることを示す「保証の水準」(証明の方法)の双方を勘案して評価される。
安全確保措置に必要とされるロバスト性の水準は、運航形態のリスクに応じて検討し、低、中、高の3
つの異なる水準があり、安全性の水準と保証の水準の低い方に準じて評価する。例えば、中レベルの安
全性の措置が、低レベルの水準で保証された場合には、その安全確保措置は低レベルと評価される。
c. 総合リスクモデル
リスク評価における「総合リスクモデル」とは、無人航空機の運航に伴うリスク、ハザード、脅威、安全確保措置の一般的な枠組みである。
2) リスク評価手法
リスク評価ガイドラインによるリスク評価手法は、次に掲げる6ステップにより構成される。ここでは、当該手法の概要を記載するが、詳細についてはリスク評価ガイドラインを参照すること。
| 手順 | 概要 |
|---|---|
| Step 1 運航計画(CONOPS)の説明 | リスク評価の最初のステップとして「運航計画(CONOPS)」を明確にする。 なお、リスク評価の結果要求される対策や安全確保措置のロバスト性の要求に より修正が必要な場合がある。 |
| Step 2 地上リスクの把握 | 無人航空機の最大寸法及び運動エネルギーと、想定する運航形態に基づき、 判定表を用いて地上リスククラスを判定し、地上リスクの軽減策とロバスト性 により調整し、調整後の地上リスククラスを決定する。 |
| Step 3 空中リスクの把握 | 想定する飛行空域において航空機と遭遇する確率について定性的に「空中リスククラス」 として判定し、必要により戦略的対策を講じることにより低減し、残留する空中リスク クラスを4段階(ARC-a/ARC-b/ARC-c/ARC-d)で決定する。 「戦略的対策」とは、飛行前に航空機との遭遇確率やリスクにさらされている時間を 低減するための任意対策であり、特定の時間帯/境界内での飛行などが挙げられる。 一方で「戦術的対策」とは、飛行中に航空機との衝突を回避するための対策であり、空中リスククラスに応じて対策の要求レベルとロバスト性のレベルが割り当てられる。 |
| Step 4 運航に関わる安全目標の確認 | これまでのステップで特定された地上リスククラスと空中リスククラスを用いて 「安全性と保証のレベル(SAIL)」を決定する。 その SAIL に基づき、「運航に関わる安全目標(OSO)」とその安全目標に対する ロバスト性が決定される。運航者は、安全確保措置の安全性の水準と保証の水準により、 運航に関わる安全目標(OSO)に対するロバスト性を満たしていることを確認する。 |
| Step 5 隣接エリアの考慮 | オペレーション空間に隣接するエリアについても評価し、そのリスクが高い場合には、 逸脱を防止するための対策を講じる。 |
| Step 6 評価結果に対する対応 | これまでのステップで評価されたリスクに対する要求事項を十分満足することを 確認し、各対策や安全目標を達成するため、リスク評価結果に基づき飛行マニュアル を作成する。なお、リスク評価の結果必要とされる対策や安全目標を達成することが できない場合は、運航計画(CONOPS)を修正する。 |
コスパ最強!入門機からプロの空撮まで使われている「DJI mini2」をリーズナブルな価格で!
7.3 気象の基礎知識・気象情報からリスク評価及び運航計画の立案
7.3.1 気象の重要性及び情報源
(1) 無人航空機における気象の重要性
無人航空機を安全に飛行させるための重要な要素の一つが気象である。
航空法では「当該無人航空機及びその周囲の状況を目視により常時監視して飛行させること。」とされている。これは目視可能な距離外での無人航空機の飛行を禁止するだけではなく、近距離であっても無人航空機の飛行状況や人物との安全確保が目視で確認できない気象状態(雲中や濃霧等)では無人航空機を飛行させてはならないことを意味する。
安全な飛行を実施するためには、まず一般的な天気予報だけではなく、どのような気象情報や予報が提供されているかを理解する必要がある。そして、自らの作業内容、時間、環境に応じて、雲や視程阻害、風向風速及び降水等、自ら行う飛行に影響する気象情報を適切に入手、分析して、離陸から着陸に至るまで支障のある気象状況にならないことを確認した後に飛行を開始しなければならない。
(2) 安全な飛行を行うために確認すべき気象の情報源
参考となる気象情報には、以下が挙げられる。
アメダス
気象レーダー
実況天気図、予報天気図、悪天解析図
インターネットを活用した気象情報の入手も有効である。
(3) 天気図の見方
天気図には、各地で観測した天気、気圧、気温、風向、風力や高気圧、低気圧、前線の位置及び等圧
線などが描かれている。実況天気図、予想天気図から気圧配置、前線の位置、移動速度などを確認する。等圧線の間隔から風の強弱を知ることができ、等圧線の間隔が狭いほど風は強まる。
1) 天気記号
快晴・晴・曇・雨・雪・霧などを表す記号である。

2) 風
天気記号に付いた矢の向きが風向を表す。風が吹いてくる方向に矢が突き出しており、観測では 16
又は 36 方位を用いているが、予報では 8 方位で表す。矢羽根の数が風力(気象庁風力階級表による
風力の尺度)を表す。風力0~12 までの 13 段階で表す。
3) 気温
天気記号の左上の数字で、摂氏の度数を表す。
4) 気圧
大気の圧力をいい、単位はヘクトパスカル(hPa)で標準大気圧(1気圧)は、1013hPa である。
5) 等圧線
気圧の等しい点を結んだ線をいう。
6) 高気圧
周囲よりも相対的に気圧が高いところを高圧部といい、その中で閉じた等圧線で囲まれたところを高
気圧という。北半球では、等圧線から約 30 度の角度で中心から外へ向かって風を吹き出している(時計回り)。高気圧の中心部では下降気流が発生し一般的に天気はよい。
7) 低気圧
周囲よりも相対的に気圧が低いところを低圧部といい、その中で閉じた等圧線で囲まれたところを低気圧という。北半球では反時計回りに低気圧の中心に向かって周囲から風が吹き込む。中心部では上昇気流が起こり、雲が発生し一般的に天気は悪い。
8) 冬の天気
冬の悪い天気の代表は「雪」と「風」である。シベリア高気圧が優勢になり冬の季節風の吹き出しが始まると、まず気象衛星の雲写真に沿海州から日本海へ流れる帯状の雲が現れる。冬型の天気の典型は西高東低といわれるもので、天気図では西側に高気圧、東側に低気圧という気圧配置で、日本海側に雪をもたらす。
9) 春と秋の天気
日本の天気を支配するのは冬のシベリア高気圧と夏の太平洋高気圧であり、春と秋は両高気圧の勢力が入れ替わるときである。このとき日本付近に両気団の境界ができ、前線が停滞し、広い範囲に悪い天気をもたらし、1週間くらい雨が降り続き、低い雲高や視程障害をもたらす。
10) 前線
温度や湿度の異なる気団(空気の塊)が出会った場合、二つの気団はすぐには混ざらないで境界がで
きる。境界が地表と接するところを前線という。
a. 寒冷前線
発達した積乱雲により、突風や雷を伴い短時間で断続的に強い雨が降る。前線が寒冷前線が接近してくると南から南東よりの風が通過後は風向きが急変し、西から北西よりの風に変わり、気温が下がる。
b. 温暖前線
層状の厚い雲が段々と広がり近づくと気温、湿度は次第に高くなり、時には雷雨を伴うときもあるが、
弱い雨が絶え間なく降る。通過後は北東の風が南寄りに変わる。
c. 閉塞前線
寒冷前線が温暖前線に追いついた前線で、閉塞が進むと次第に低気圧の勢力が弱くなる。
d. 停滞前線
気団同士の勢力が変わらないため、ほぼ同じ位置に留まっている前線で、長雨をもたらす梅雨前線
や秋雨前線がこれにあたる。
e. 梅雨前線
梅雨前線とは、四季の変わり目に出現する長雨(菜種梅雨、梅雨、秋霖など)のうち、とくに顕著な長
雨、大雨をもたらす停滞前線のことである。
7.3.2 気象の影響
(1) 安全な⾶⾏のために知っておくべき気象現象
1) 雲と降水について
雲には10種雲形と呼ばれる10種類の雲の形がある。
上層雲として巻雲・巻層雲・巻積雲が、中層雲として高層雲・乱層雲・高積雲が、低層雲と下層から発
達する雲として積雲・積乱雲・層積雲・層雲がある。このうち層雲系の雲では連続的な降水が、積雲系であれば断続的でしゅう雨性の降水を伴う傾向がある。
2) 風
a. 風と気圧
風とは、空気の水平方向の流れをいい、風向と風速で表す。空気は、気圧の高いほうから低いほうに
向かうが、この流れが風である。等圧線の間隔が狭いほど風は強く吹く。
b. 風向
風向は、風が吹いてくる方向で、例えば、北風とは北から南に向かって吹く風をいう。風向は 360
度を 16 等分し、北から時計回りに北→北北東→北東→東北東→東のように表す
c. 風速
風速は空気の動く早さで、メートル毎秒(m/s)で表す。風は必ずしも一定の強さで吹いているわけで
はなく、単に風速と言えば、観測時の前 10 分間における平均風速のことをいう。
また、平均風速の最大値を最大風速、瞬間風速の最大値を最大瞬間風速という。
風は地面の摩擦を受けるため、一般的に上空では強く地表に近づくにつれて弱くなる。変化の度合い
は地表の粗度(樹木や建物などによる凸凹の程度)や風速の大きさによって異なる。一般に地表の粗度
が大きいほど、高さによる風速の変化は大きくなる。
d. 突風
低気圧が接近すると、寒冷前線付近の上昇気流によって発達した積乱雲により、強い雨や雷とともに
突風が発生することがある。日本付近では、天気は西から東に変わるため、西から寒冷前線を伴う低気
圧が接近するときは、突風が発生する時間帯を予測することができる。
e. 海陸風
気温差があると、気圧差が生じて風が吹く。海陸風は海と陸との気温差によって生じる局地的な風で、
日本では、日差しの強い夏の沿岸部で顕著に見られる。地表付近において、日中は、暖まりやすい陸上
に向かって風が吹き、夜間は、冷めにくい海上に向かって風が吹く。風が入れ替わるときには、ほぼ無風状態になり、「朝凪」「夕凪」と呼ばれる。
f. 山谷風
山岳地帯に現れる風の一種。昼間は、日射で暖められた空気が谷を這い上がる谷風が吹き、夜間は
冷えた空気が山から降りる山風が吹く。
g. 風力
風力は、気象庁風力階級表(ビューフォート風力階級)により、風力0から風力 12 までの 13 階級で表す。
h. ビル風
高層ビルや容積の大きい建物などが数多く近接している場所及び周辺に発生する風で、強さや建物
周辺に流れる風の特徴により分類される(剥離流、吹き降ろし、逆流、谷間風、街路風などがある)。
ビル風は周辺の風より風速が速く継続して吹いていて、その建物群の配置や構成によって吹く風の
種類が異なる。
i. ダウンバーストについて
ダウンバーストとは、積乱雲や積雲内に発生する強烈な下降流が地表にぶつかり、水平方向にドーナ
ツ状に渦を巻きながら四方に広がってゆく状態をいう。その大きさは数百 m から10km にもおよぶ。その中でマイクロバーストと呼ばれるものは、直径が4km程度以下の下降流で、範囲は小さいが下降流はダウンバーストより強烈なものがある。発生時間は数分から10分程度のものが多く、通常の観測網では探知されない局地的なものである。
(2) 気象に関する注意事項
無人航空機は、運用可能な動作環境が具体的に明示されている。運用可能な範囲内であっても、気温の高低には大きな影響をうけることが予想される。特に気温の低い場合はバッテリーの持続時間(飛行可能時間)が普段より短くなる可能性があるため注意が必要である。
地表面が暖められると上昇気流が発生するため、広い面積の太陽光パネルやアスファルト・コンクリートの地面が多い市街地は注意が必要である。また、広い運動場のような場所では、強い日射により上昇気流がおこりつむじ風が発生する可能性がある。
(3) 気象状況の把握と飛行の実施の判断
安全のための気象状況の確認及び飛行の実施の判断安全のため気象条件を考慮した判断をする場合、降雨時、降雪時、霧の発生時や雷鳴が聞こえる時は飛行の延期や中止が望ましい。
もはや1家に1台レベル ⁈ 簡単に飛ばせる最高性能のトイドローン「TELLO」!
ドローンの入門機にも、子供のおもちゃにも最適なドローンを低価格で!

7.4 機体の種類に応じた運航リスクの評価及び最適な運航の計画の立案
7.4.1 飛行機
(1) 飛行機の運航の特徴
飛行機は回転翼航空機と比べて、滑走により離着陸するため広い離着陸エリアが必要である。また飛行中の旋回半径が大きくなることにも注意が必要である。
飛行機の運航は、離着陸共に向い風を受ける方向から行う(追い風の離着陸は失速の恐れがある)。横風の場合でも可能な限り向かい風方向で行うが操縦難度は高くなる。回転翼航空機と違いホバリング(空中停止)はできない。上空待機を行う場合はサークルを描くように旋回飛行を行う。着陸は失速しない程度に速度を下げて行うため、高度なエレベーター操作が必要となる。
(2) 使用機体と飛行計画を元にしたリスク軽減策の検討要素の例〔一等〕
飛行機の飛行計画においては気象、経路、緊急着陸地点の確保が重要である。離着陸においては向かい風で行うため風向の予測と風向に適した滑走路の確保が必要となる。また地上風速だけでなく上空の風速の確認も重要である。地上経路設定においては過度な上昇角度、過度に旋回半径が小さくならないようにする。緊急着陸は滑空により行うので広範囲のエリアが必要となる。リスク低減対策として飛行計画が正しく設定されているか複数人で確認を行う運航者の体制も重要である。
(3) リスク軽減策を踏まえた運航の計画の立案の例〔一等〕
飛行機において、リスク軽減策を踏まえた運航計画の立案の際に留意すべき要素の例として、以下の
項目が挙げられる。
1) 離陸及び着陸
離着陸地点は操縦者及び補助者と 20m 以上離れることを推奨する。取扱説明書等に推奨距
離が記載されている場合はその指示に従う。
離着陸地点は滑走範囲も考慮して周囲の物件から 30m以上離すことができる場所を選定する。
距離が確保できない場合は、補助者を配置するなどの安全対策を講じる。
離陸後は失速しない適度な速度と角度を保って上昇する。
着陸は失速しない程度の低速度で滑走路に確実に侵入させ、安全に接地させる。
2) 飛行
上昇・旋回・降下させる場合は、取扱説明書等で指定された条件範囲内で飛行させる。
飛行中断に備え、飛行経路上又はその近傍に緊急着陸地点を事前に選定する。第三者の立入りを制限できる場所の選定又は補助者の配置を検討する。
7.4.2 回転翼航空機(ヘリコプター)
(1) 回転翼航空機(ヘリコプター)の運航の特徴
回転翼航空機(ヘリコプター)は、構造上プロペラガードがない機体が一般的であるため、安全のため
にプロペラガード付きのマルチローター機よりも広い離着陸エリアが必要である。離着陸において、機体と操縦者及び補助者の必要隔離距離を十分確保すること。
機体高度がメインローター半径以下になると、地面効果の影響が顕著になりやすいため、推力変化及びホバリング時の安定・挙動に注意が必要である。
前進させながら上昇させた方が必要パワーを削減できる。山間部又は斜面に沿って飛行させる場合、吹き下ろし風が強いと上昇できない場合があり、注意が必要である。
垂直降下又は降下を伴う低速前進時は、ボルテックスリング状態となり、急激に高度が低下し回復で
きない危険性がある。前進させながら降下することは、ボルテックスリング状態の予防に有効である。
オートローテーション機構を装備している機体は、動力が停止しても軟着陸が可能である。ただし、オートローテーションに入るためには必要な操作、飛行高度範囲及び速度範囲がある。
(2) 回転翼航空機(ヘリコプター)の使用機体と飛行計画を元にしたリスク軽減策の検討要
素の例〔一等〕
1) 離陸及び着陸
離着陸地点において、機体と操縦者、補助者及び周囲の物件との必要な安全距離を確保する。
地面効果範囲内の飛行時間を短くする。
2) 飛行
余裕を持った上昇率を設定する。
ボルテックスリング状態を予防できる降下方法を選定する。
緊急着陸地点の安全確保方法を飛行前に検討する。
オートローテーション機能を理解し、飛行訓練を実施する。(機能付きの場合)。
(3) リスク軽減策を踏まえた運航の計画の立案の例〔一等〕
回転翼航空機(ヘリコプター)において、リスク軽減策を踏まえた運航計画の立案の際に留意するべ
き要素の例として、以下の項目が挙げられる。
1) 離陸及び着陸
離着陸地点は操縦者及び補助者と 20m 以上離れることを推奨する。取扱説明書等に、推奨距
離が記載されている場合は、その指示に従う。
離着陸地点は周囲の物件から 30m以上離すことができる場所を選定する。距離が確保できない
場合は、補助者を配置するなどの安全対策を講じる。
離陸後は速やかに地面効果外まで上昇する。機体状況の確認は地面効果外とする。
2) 飛行
上昇させる場合は、取扱説明書等で指定された上昇率以内で飛行させる。
前進させながら上昇させる飛行経路を検討する。
降下させる場合、ボルテックスリング状態に入ることを予防するため、取扱説明書等で指定され
た降下率範囲及び降下方法で飛行させること。
飛行中断に備え、飛行経路上又はその近傍に緊急着陸地点を事前に選定する。プロペラガード等の安全装備がない機体の場合、第三者の立入りを制限できる場所の選定又は補助者の配置を検討する。
オートローテーション機能を装備した機体を運航する場合、機能が発揮できる条件を運航の計
画に考慮する。
7.4.3 回転翼航空機(マルチローター)
(1) 回転翼航空機(マルチローター)の運航の特徴
回転翼航空機(マルチローター)は複数のローターを機体周辺に備え、ローターを回転させることによ
り揚力を得て垂直上昇し、フライトコントロールシステムにより安定した飛行を行うことができる。
(2) 回転翼航空機(マルチローター)の使用機体と飛行計画を元にしたリスク軽減策の検討
要素の例〔一等〕
1) 離陸及び着陸
離着陸地点において、機体と操縦者、補助者及び周囲の物件との必要な安全距離を確保する。
地面効果範囲内の飛行時間を短くする。
2) 飛行
飛行経路において人や物件との必要な安全距離を確保する。
緊急着陸地点の安全確保方法を飛行前に検討する。
自動帰還時の高度を障害物等が回避できる安全な高さに設定する。
(3) リスク軽減策を踏まえた運航の計画の立案の例〔一等〕
1) 離陸及び着陸
離陸地点は操縦者及び補助者との距離を 3m 以上保つか、機体の取扱説明書に推奨距離が記
載されている場合はその指示に従う。
離陸地点は周囲の物件から 30m以上離すことができる場所を選定する。距離が確保できない
場合は、補助者を配置するなどの安全対策を講じる。
2) 飛行
飛行経路での最高飛行高度の設定を行う。
飛行中断に備え、飛行経路上又はその近傍に緊急着陸地点を事前に選定する。プロペラガード等の安全装備がない機体の場合、第三者の立入りを制限できる場所の選定又は補助者の配置を検討する。操縦者も必要に応じて保護具を使用する。
7.4.4 大型機(最大離陸重量 25kg 以上)
(1) 大型機(最大離陸重量 25kg 以上)の運航の特徴
大型機(最大離陸重量 25kg 以上)は、事故発生時の影響が大きいことから、操縦者の運航への習熟度及び安全運航意識が十分に高いことが要求される。大型機は機体の慣性力が大きく増速・減速・上昇・降下などに要する時間と距離が長くなるため、障害物回避には特に注意が必要である。
緊急着陸地点の選定も小型機よりは広い範囲が要求される。一般に小型の機体よりも騒音が大きくな
るため、飛行経路周囲への配慮が必要である。
(2) 大型機(最大離陸重量25kg以上)の使用機体と飛行計画を元にしたリスク軽減策の検
討要素の例〔一等〕
飛行速度に応じた障害物回避に必要な時間や距離を事前に把握する。
安全な緊急着陸地点を選定する。
離着陸地点及び飛行経路周辺の騒音問題対応を検討する。
(3) リスク軽減策を踏まえた運航の計画の立案の例〔一等〕
リスク軽減策を踏まえ、次の内容を織り込み、運航の計画を立案すること。
障害物回避など機体の進行方向を変える場合は、時間的、距離的な余裕を十分に考慮した飛行経路及び飛行速度を設定する。
緊急着陸地点は、第三者の進入が少ない場所(河川敷、農地など)を選定する。
離着陸地点を含む飛行経路近隣エリアへの事前説明、調整を計画する。
![]()
7.5 飛行方法に応じた運航リスクの評価及び最適な運航計画の立案
7.5.1 夜間飛行
(1) 夜間飛行の運航について

夜間飛行は、機体の姿勢及び方向の視認、周囲の安全確認が困難となる。夜間飛行においては、原則として目視外飛行は実施せず、機体の向きを視認できる灯火が装備された機体を使用する。操縦者は事前に第三者の立入りの無い安全な場所で、訓練を実施すること。離着陸地点を含め、回避すべき障害物などには、安全確保のため照明が必要である。
(2) 夜間飛行のリスク軽減を図るための対策と提案について〔一等〕
操縦者は、夜間飛行の訓練を修了したものに限定する。
夜間における機体灯火の視認可能範囲など、飛行範囲を明確にする。
操縦者と補助者の連絡方法の有効性を確認する。
飛行経路下を飛行管理区域に設定する。
第三者が出現する可能性が高い地点の特定と対応方法を検討する。
離着陸を予定している場所、回避すべき障害物、緊急着陸予定地点を視認可能とする。
(3) 夜間飛行におけるリスク軽減策を踏まえた運航の計画の立案の例〔一等〕
リスク軽減策を踏まえ、次の内容を織り込み、運航の計画を立案すること。
夜間飛行においては、目視外飛行は実施せず、機体の向きを視認できる灯火等が装備できる機体を使用し、機体の灯火が容易に認識できる範囲の飛行に限定する。
飛行高度と同じ半径内に第三者が存在しない状況でのみ飛行を実施する。
離着陸を予定している場所、回避すべき障害物、緊急着陸予定地点を照明の設置等により明確
にするとともに、機体が視認できるようにする。
飛行経路全体を見渡せる位置に、無人航空機の飛行状況及び周囲の気象状況の変化等を常に
監視できる補助者を配置し、補助者は操縦者が安全に飛行させることができるよう必要な助言を
行う。
第三者が出現する可能性が高い地点には、補助者を配置する。
操縦者と補助者は常時連絡が取れる機器を使用する。
補助者についても、機体特性を十分理解させておく。
7.5.2 目視外飛行
(1) 目視外飛行の運航について

1) 補助者を配置する場合
目視外飛行の運航は、機体の状況や障害物等の周囲の状況を直接肉眼で確認することができない。
飛行経路全体を把握し、安全が確認できる双眼鏡等を有する補助者の配置を推奨する。目視外飛行に
おいては、次に掲げる機能を装備した無人航空機を使用すること。
自動操縦システムを装備し、機体に設置したカメラ等により機体の外の様子が監視できる。
地上において、無人航空機の位置及び異常の有無を把握できる(不具合発生時に不時着した場
合を含む)。
不具合発生時にフェールセーフ機能が正常に作動する。
当該機能の例は、以下のとおり。
① 電波断絶の場合に、離陸地点まで自動的に戻る機能又は電波が復帰するまでの間、空中
で位置を継続的に維持する機能
② GNSS の電波に異常が見られる場合に、その機能が復帰するまでの間、空中で位置を継
続的に維持する機能、安全な自動着陸を可能とする機能又は GNSS 等以外により位置情報を
取得できる機能
③ 電池の電圧、容量又は温度等に異常が発生した場合に、発煙及び発火を防止する機能並
びに離陸地点まで自動的に戻る機能又は安全な自動着陸を可能とする機能
2) 補助者を配置しない場合
補助者を配置しない場合は、無人航空機に求められる要件が追加されることに注意が必要である。
追加される要件を次に掲げる。
航空機からの視認をできる限り容易にするため、灯火を装備する。または飛行時に機体を認識しや
すい塗色を行う。
地上において、機体や地上に設置されたカメラ等により飛行経路全体の航空機の状況が常に確認
できる。
第三者に危害を加えないことを、製造事業者等が証明した機能を有する。ただし立入管理区画(第
三者の立入りを制限する区画)を設定し、第三者が立ち入らないための対策を行う場合、又は機体や地上に設置されたカメラ等により進行方向直下及びその周辺への第三者の立入りの有無を常に監視できる場合は除く。
地上において、機体の針路、姿勢、高度、速度及び周辺の気象状況等を把握できる。
地上において、計画上の飛行経路と飛行中の機体の位置の差を把握できる。
想定される運用に基づき、十分な飛行実績を有する機体を使用すること。この実績は、機体の初期故障期間を超えていること。
(2) 目視外飛行のリスク軽減を図るための対策と提案について〔一等〕
1) 補助者を配置する場合
操縦者は、目視外飛行の訓練を修了したものに限定する。
事前確認などにより、適切な飛行経路を選定する。
適切な補助者の配置を検討する。
飛行前に、飛行経路下に第三者が存在しないことを確認する。
操縦者と補助者の連絡方法の有効性を確認する。
2) 補助者を配置しない場合
補助者を配置しない場合は、次の内容を追加する。
操縦者は、補助者無し目視外飛行の教育訓練を修了したものに限定する。
飛行経路は第三者の存在する可能性の低い場所を選定する。
有人機の運航を妨げない飛行範囲を設定する。
緊急時の対応と、緊急着陸地点をあらかじめ設定する。
立入管理区画を設定した場合、第三者が立ち入らないための方策及び周知方法を設定する。
(3) 目視外飛行におけるリスク軽減策を踏まえた運航の計画の立案の例〔一等〕
リスク軽減策を踏まえ、次の内容を織り込み、運航の計画を立案すること。
1) 補助者を配置する場合
飛行経路及び周辺の障害物件等を事前に確認し、適切な経路を特定し選定すること。
飛行経路全体が見渡せる位置に飛行状況及び周囲の気象状況の変化等を常に監視できる双眼鏡等を有する補助者を配置し、操縦者へ必要な助言を行うこと。
操縦者と補助者が常時連絡を取れること。
補助者が安全に着陸できる場所を確認し、操縦者へ適切な助言を行うことができること。
補助者にも機体の特性を理解させておくこと。
2) 補助者を配置しない場合
補助者を配置しない場合は、次の内容を追加する。
飛行経路には、第三者が存在する可能性が低い場所を設定する。第三者が存在する可能性が
低い場所は、山、海水域、河川・湖沼、森林、農用地、ゴルフ場又はこれらに類するものとする。
空港等における進入表面等の上空の空域、航空機の離陸及び着陸の安全を確保するために必
要なものとして国土交通大臣が告示で定める空域又は地表若しくは水面から 150m以上の高さ
の空域の飛行は行わない。(一時的に地表から 150m を超える飛行を行う場合は、山間部の谷
間など、航空機との衝突のおそれができる限り低い空域を選定する。)
全ての飛行経路において飛行中に不測の事態(機体の異常、飛行経路周辺への第三者の立入り、
航空機の接近、運用限界を超える気象等)が発生した場合に、付近の適切な場所に安全に着陸
させる等の緊急時の対策手順を定めるとともに、第三者及び物件に危害を与えずに着陸ができ
る場所を予め選定すること。
飛行前に、飛行させようとする経路及びその周辺について、不測の事態が発生した際に適切に
安全上の措置を講じることができる状態であることを現場確認する。
飛行範囲の外周から落下距離の範囲内を立入管理区画とし、飛行経路には第三者が存在する
可能性が低い場所の設定基準を準用する。
立入管理区画を設定した場合は、当該立入管理区画に立看板等を設置するとともに、インター
ネットやポスター等により、問い合わせ先を明示した上で上空を無人航空機が飛行することを第
三者に対して周知する。
立入管理区画に道路、鉄道、家屋等、第三者が存在する可能性を排除できない場所が含まれる
場合には、追加の第三者の立入りを制限する方法を講じる
![]()


コメント