
こんにちはヤーコです♪趣味としてドローンを始め、練習・勉強しながらその経験を記録しています。
今回は、 ドローン検定3級勉強の一環として、そもそもドローンとは何か、ドローンの基本構造についてについて調べましたので解説します。
なお、ドローン検定3級に合格する為のオススメの勉強法はこの本を読んで勉強することです。
主催のドローン検定協会が発行する公式テキストですので、この本を読んで例題を90%以上解けるようになれば、
合格ラインの80点はほぼ間違いなく獲得できます。
普通に読めば2~3時間で読み終える内容になっています。
ドローンとは何か
ドローンとは無人航空機(UAV:Unmanned Aerial vehicle)の一種です。
無人航空機とは、人が乗ることが出来きず、遠隔操作や自動操縦によって飛行させる事が出来る物体を言います。
その中に飛行機(ラジコンヘリ)・回転翼機(プロペラ機)・滑空機・飛行船などがあります。
一般的なドローンは、複数の翼を持つ回転翼機、マルチコプターという分類になります。
ちなみに、回転翼が一つの場合はヘリコプター、4つの場合はクアッドコプターなんて呼ばれます。
また、200g以下の機体に限っては、「模型航空機」と呼ばれます(2022年6月からは法改正により100g以上も無人航空機に含まれる様になる)
模型航空機は、無人航空機よりも法規制が緩やかになります

ドローンの機体構造
下記に一般的なドローン(マルチコプター)の機体構造を示します。

・センターフレーム
機体の中心部分はセンターフレームと呼ばれ、ドローンの動作をコントロールするシステムや各種センサーなどが搭載されています。
・ランディングギア(スキッド)
ランディングギアは、スキッドともよばれますが、離着陸を支える ’’脚’’ の事です。
格納が可能なランディングギアは、リトラクタブル(引込可能)ギアと呼ばれます。
・ブレード(プロペラ)
ブレード(プロペラ)は、回転することで揚力を生み出し、ドローンの飛行を可能にします。
ドローンはブレードが4つ付いているドローンが多いですが、6つ、8つあるいは3つのブレードで飛行する機体もあります。
ブレードの回転方向は、隣り合うブレードで反対方向にすることで、飛行を安定化させています。例えばブレードが4つのドローンであれば右回転⇒左回転⇒右回転⇒左回転というブレードの回転方向になります。
・モーター(ローター)
モーター(ローター)は、ブレードに回転を与える動力源です。多くのドローンでは、’’ブラシレスDCモーター’’ というモーターが使用されています。
・アーム
アームは、ブレードとローターを支えている部分です。
・カメラ
カメラは、ドローン飛行においては必要ないですが、ドローンを使用する多くの人は、空撮や観測などを必要とすることから、多くのドローンに搭載されています。
・ジンバル
ジンバルとは、ドローンのカメラ撮影において、飛行によるブレを軽減し滑らかな撮影を可能にする補助装置です。
高機能カメラを搭載したドローンには、ジンバル付きのものが多いです。
センサー
ドローンには様々なセンサーが搭載されています。
センサーがあることで、ドローンは安全に・安定して飛行できます。
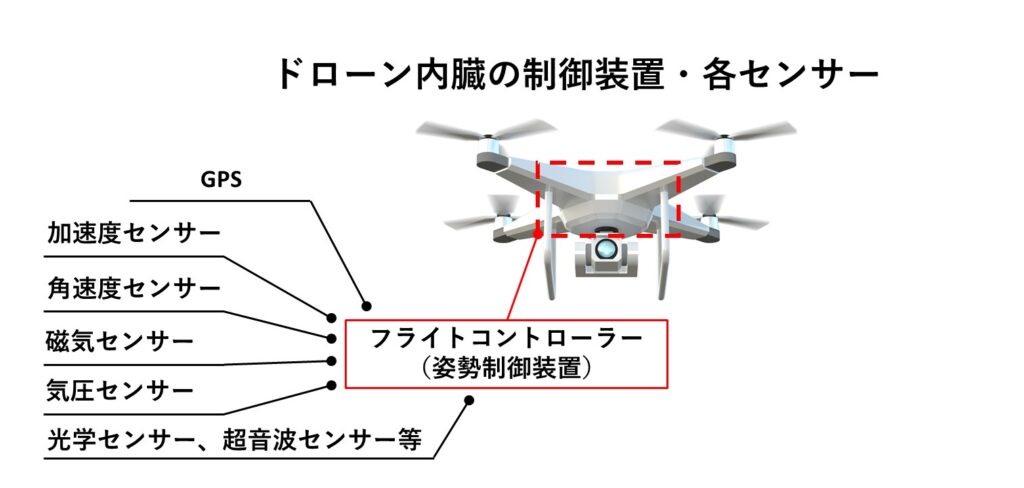
・フライトコントローラー(姿勢制御装置)
フライトコントローラー(姿勢制御装置)は、ドローンに搭載されている各センサー情報を統合し、実際の飛行動作に反映させる、ドローンの「脳」にあたる装置です。
・GPS
「GPS」は、「Global Positioning System」の略です。
「GPS」は、地球の周回軌道を回る人工衛星から発信される電磁波を受信物が受け取る事で、衛星との位置関係を測定し、地球上のどの位置に受信物があるか正確に割り出すシステムです。。
複数の人工衛星から電磁波を受信することで、ドローンの位置を精確に割り出し、
ホバリング中に風などで動いてしまっても最初の位置からどれだけズレたかを検知し、その分戻る様にし、その場に留まるように制御します。
GPSは、「スマートフォン」や「カーナビ」にもあります。Googleマップ等で自分の位置を把握できるのはそのおかげです。
・加速度センサー
ドローンの速度の変化量を検出するセンサーです。
上下、左右、前後の3軸の動きを検知します。
「加速度センサー」と「角速度センサー」はドローンにおける「姿勢保持」に関係する欠かせないセンサーです。
・角速度センサー
ドローンの角度(回転)の変化量を検出するセンサーです。
機体が傾いた角度を計算し、その分の傾きを戻すことで機体の安定化をはかる、姿勢制御に欠かせないセンサーです。
加速度センサーと角速度センサーを組み合わせることで、「傾き具合」と「速度」の両方の変化量を計算することができます。
これによって、機体の傾きと反対の向きに制御し、ドローンを平行にする事で安定した「ホバリング」が可能になります。
・磁気センサー
磁気方位センサーは、ドローンが東西南北のどの方向に向いているかを検出します。
いわゆる「コンパス」と呼ばれるもので、これによってドローンが現在どこを向いているのかが分かります。
コンパスは、飛行させる場所によって磁気の影響を受けるため、ドローンを飛行させる場所を変更する際には、「コンパスキャリブレーション」(コンパスリセット)を行い、コンパスの調整を行う必要があることも覚えておきましょう。
・気圧センサー
気圧センサーはドローンの高度を検出するセンサーです。
高度が高くなればなるほど、気圧は低くなるため、この気圧の変化を検出し、ドローンの高度を測定したり、高度を維持したりしています。
ただし、あくまでも気圧を測定するもののみであるため、例えば急な突風などによる気圧の変化や、地上に近い場所などではうまく機能しない場合もあります。
・その他のセンサー
ドローンに搭載されているセンサーは、上に挙げたものが主なものですが、機種によってはそのほか他にも
光学センサー:機体下方の状況変化の検出を可視光映像でとらえています。
低高度でのホバリング制度の補正や自動離着陸時に主に機能しているセンサー
超音波センサー:超音波の跳ね返りを利用して、高度制御に使用されます。
前述した気圧センサーでは、地上付近での離発着では対応ができないため、この超音波センサーを使うことで高度維持を行うことが可能になります。


コメント